
 ϵ�҂�...
ϵ�҂�...  �A��܇��ʩ���r�˸߿��Ƶĵȷ�ֱ...
�A��܇��ʩ���r�˸߿��Ƶĵȷ�ֱ...  �¼��gIDITI ���������S���ػ�̎...
�¼��gIDITI ���������S���ػ�̎...  �h�L�����zַ���o�^���ü��_�lס...
�h�L�����zַ���o�^���ü��_�lס...  ��У���A�Oʩ���OBOT�Ŀ�о�...
��У���A�Oʩ���OBOT�Ŀ�о�...  �����ľ�����W����...
�����ľ�����W����...  ���䉺��ɰʯ�|���������^��ʩ...
���䉺��ɰʯ�|���������^��ʩ...  ��̼���н��O��������̽���c���`...
��̼���н��O��������̽���c���`...  �\Մ�Ї��Ŵ����������c�����İl...
�\Մ�Ї��Ŵ����������c�����İl...  �h�L�����zַ���o�^�Ȱ��ü��_�l...
�h�L�����zַ���o�^�Ȱ��ü��_�l...  ���Ͱl늙C���Ļ��Σ�U��e��...
���Ͱl늙C���Ļ��Σ�U��e��...  ������͙Cе�S����Ҏ���OӋ...
������͙Cе�S����Ҏ���OӋ...  ����ʮλ������������B������Ʒ...
����ʮλ������������B������Ʒ...  ����������ˇ�g�^�����OӋ��һ��...
����������ˇ�g�^�����OӋ��һ��...  ���u��������Ƽ���������OӋ...
���u��������Ƽ���������OӋ... ��x 14388 �� ����ƽ��ܘ�ƽ�������Փ��ԇ��о�
����ƽ��ܘ�ƽ�������Փ��ԇ��о�
������ ������
ͬ����W �Ϻ�200092 �Ϻ��������̹ɷ�����˾ �Ϻ� 200082
����ƽ��ܘ��c������Ͷܘ���ȣ��гɱ������^�͡�����Ч�ʸߡ��m�õ،ӷ����V�ȃ��c�����҇��������ʩ���еõ��ˏV���đ��á����Ϻ����������Ͼ����V�ݡ����ڼ����ȵ��Fʩ���л����϶���������ƽ��ܘ���ȡ���˵��F����ľ�ɹ�����ֹ1995�꣬�Ϻ��ڸ������ʹ�õ�����ƽ��ܘ�ռ���N��Ͷܘ���44�����ڇ��ȸ��ص��F���O�л����϶�ʹ������ƽ��ܘ���
һ���J�飬���}�ȵ����������c�_����������ˮ����ȡ��ƽ��r������ƽ���B�����}�����O���r�����������oֹ����������Ӌ�㡣���H�ϣ������������ã����}�ȉ�������С�ڶܘ�������ǰ�����w�Č��H�������ܘ��cǰ�����w�Ľ��|���������}��������匦���w�����ľC�����á����f������ƽ�⑪ԓ�Ƕܘ��cǰ�����w�Ľ��|�����c��ˮ������ƽ�⡣���⣬߀��һ�Nƽ�⌦����ƽ��ܘ����Ƹ������x�����Ƕܘ����M���������w���c�����C�ų����w����ȡ��@�Nƽ�⌦���Ƶ،�׃�θ������x���ܘ��ăɷNƽ���B������ȫ�ȃr���@һ�c���������C����
����һ�Nƽ���B�M�п��Ƶķ����ܺ��Σ��������O�����}������ʼֵ��Ȼ��ͨ�^��ǰ���،�¡�����M�бO�y�������Mһ���{�����}���������ڶ��Nƽ���B�M�п��ƕr������һ��ܘ����������^���H�y�����^�����y������ƽ���^�����y��
�о�����������ƽ��ܘ������}�����c�����C�D�١����M�ٶ������@�����P�ԣ��@Ҳ�f���ܘ��ij�����r�c�����C�D�١����M�ٶ������P�ԡ������µȏ���Փ���о������}�����������C�D���c���M�ٶȆ��Ĕ����Pϵ�������Mһ���о��˳������c�����C�D�١����M�ٶ��g���Pϵ���о��Y����������������һ�N�µ�ƽ����������������ԭ������Փ���Mһ���a�䣬�����ˌ�����ƽ��ܘ������⣬������ƽ��ܘ��Ԅӿ����ṩ��һ��ȫ�µ�˼·��
����ƽ��ܘ�ʩ���r�����F��ȫƽ����M�����ܘ����M�����¶������������C���ͳ��������Ġ�B�Ǻ��y���C�ġ������Ϻ��ȵصĜyԇ�Y�����������ƽ��ܘ��������������ڶܘ����������w������ǰ�����w�a����һ���ĔD�����ڶܘ�ǰ���γ���һ����¡���@�N�D�������ڲ������ʽ���P�Ķܘ�ʩ�����Ȟ����@���@�N�D�������γ��˶ܘ�ǰ��һ�������ĸ��ӑ��������о��ܘ����M�����،ӓpʧ�����ӑ�����Ҏ�ɟo�Ɍ�Ŀǰ�ڽ�(��)�����Խ����x���M�ܘ��r������������Ҫ���x��
1������ƽ��ܘ����Mԭ��
����ƽ��ܘ����{�������C�D�ف��S�����}����ƽ�⡣������M�ٶȲ�׃�������C�D�ټӿ�r���������ӣ����}����׃С�������C�D�ٜp���r�������pС�����}����׃��������M�r�ܘ����������w�w�e���ڱ������C�ų������w�w�e���t�]�е،ӓpʧ�������Ӕ_����С���˕r���ܘ��cǰ�����w�Ľ��|�����ӽ����w���oֹ����������������������ĔD������(�_�����^��r)�����}�����ӽ��ܘ��cǰ�����w�Ľ��|�������˕r�����_�����^������ƽ���B�����H����ȫ��������ƽ��dz����y�����M�r�����C�ų������w�w�e���ߴ��ڶܘ����������w�w�e�γ�Ƿ���M��B������С�ڶܘ����������w�w�e�γɳ����M��B���ɷN��B�քe���ǰ�����|����С�ڻ�������w���oֹ����������������ƽ��ܘ��ľ��M�^�̅����D1���ܘ����MdS�����P��������Ȼ��B���w�e��dV�������M�^���б������C�ų����ஔ����Ȼ��B�����w�w�e��dV���������dV����
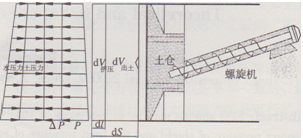
�D1 ����ƽ��ܘ����Mԭ��D
2������ݔ�͙C�c������Ӌ��
2.1����ƽ��ܘ�ʹ�õ������C����
����������ƽ��ܘ�����Ҫ�M�ɲ��֣�������Ҫ��;�ǣ����������}�ھ�����w����ʹ��M�������C�ȵ������������Ӳĺ�Ļ�����γ�һ����������B�m�w���_��ֹˮ��Ŀ�ģ���������ݔ�͵��D�����_���������Ŀ��ơ������C���S����ͣ����Ȳ��õ�����ƽ��ܘ���������ͨ������ݔ�͙C�����w��ʽ��D2��ʾ��
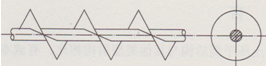
�D2����ƽ��ܘ�ʹ�õČ��wʽ������ʽ
2.2�����C�������c������ʽ�Pϵ
һ����f��������w����M�����Cͨ�^����ȵĿ��g�������Cһ�D�ij�����������ʽӋ�㣺

ʽ�У�Q�������Cһ�D��������D1�������Cֱ����D2�������C�Sֱ����P��������Ƭ���g�ࡣ
���H��ʩ���r�����wһ�㲻�����M�~Ƭ�g�Ŀ�϶�������Cһ�D���H����С��ʽ(1)Ӌ��Y����ȡ��=Q���H/Q���Q�������C����Ч�ʡ����ԣ�ʽ(1)�dz���Ч���_��100���r��һ�D�����������ڲ�ͬ���|�����������C�ij���Ч�ʲ�ͬ���Ʌ�����1��
��1��ͬ���|�������C����Ч��
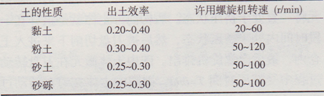
ԇ��о����������C���������^һ�����D�ٕr��ݔ�͵��w���_ʼ�a���ڴ�ֱݔ�ͷ�������S��ʹݔ���^��׃�ò��������˕r������ɳ������IJ�������Ӱ����}�ȉ����ķ�����������������Բ��ã��^����D�لݱ���ɳ����IJ��B�m��Ҳ������Ӱ�����ƽ��ܘ���ƽ���B����ˣ�����ij�N��͵������C�����������һ�����ޣ��Q���˶ܘ����M�ٶȵ�����ֵ�� �ʴ_���������C�S�õ�����D���Dz����ģ������� �����潛ʽ���_������������S���D�٣�

ʽ�У�D������ֱ��(in)��A�齛�ϵ����������rȡ20������ȡ35��ɰ��ȡ30��ɰ�[ȡ25��
2.3�����C�������c�D�ٵ��Pϵ
�����C�D���c�����������_�Pϵ����ʽ(1)�п�֪�����Cһ�D���������M���ƌ�����ʽ��
dG=��kQNdT (3)
ʽ�У�dT��Ӌ��r�g��dG��dT�ȳ����Ŀ�������k����w�e�Q��������ą������c�������|���P��Q�������Cһ�D����������ʽ(1)Ӌ�㣻N�������C�D�٣��Ǟ������C����Ч�ʣ��c���w���|���D�ٵ����P��
�ܘ�ʩ����ʩ���ˆT���P����һ�Εr�g�Ⱦ����˶�����Ȼ��B�����w�����ԣ����������Q�����Ȼ��B���w�w�e������ڶܘ����M�r�����Ӳ��ϕr��߀�����]���Ӳ��ϵ�������ȡke=dG��Ȼ/(dG��Ȼ+dG����)�� �Q����Ч�����ȡ��˕r������ʽ�Q���dT���������C�ų����ஔ����Ȼ��B���w�w�e��

ʽ�У���0�����w����Ȼ���أ�dV�����������ų����� ������Ȼ��B���w�w�e����D1��ʾ��
3���������c����ƽ��ܘ�ʩ���������Pϵ
����ƽ��ܘ��������Ƕܘ����M�r����ƽ�����Ҫ���������Q������ƽ��ܘ����M�r�،ӓpʧ�Ĵ�С���Q��ǰ���a������¡��������ʩ���r��횇�����Ƴ����ʲ����_���h�����o��Ҫ�����F�ȴ��Ͷܘ�ʩ���rʹ�õĶܘ��������dz����������кܴ����y���ڌ��Hʩ�����ƕr��������ֻ�ܸ��������O���w�e��Ź��㣬�@�Ӿ�ֻ�ܶ��Կ��Ƴ����ʡ���ˣ�ʩ����������Ŀ��Ƴ����ʞ�95��-98���������H���Ʋ��]�ж�����x��
�ܘ�ʩ���r�ɼ��˴���ʩ�����������@Щ�ԄӲɼ��Ĕ�������������ƽ��ܘ��ij����ʟo���Ƕ������Ƴ����������;��������ͨ�^�D1��ʾ������ƽ��ܘ����Mԭ���ƌ��ܘ��������c�ܘ�ʩ����������Փ�Pϵ��
�ܘ����M������ƽ���B�Ƕܘ����M��������Ȼ���w�w�e�c�����C�ų������ஔ����Ȼ���w�w�e��ȣ��˕r�o�،ӓpʧ���ܘ���ǰ�����w�_����С������ܘ�̎�ڳ����M��B���ܘ��D��ǰ�����w���D���� dV�D��(���Q�����Ȼ��B���w)�飺
dV�D��=dV��dV���� (5)
���O�ܘ�dT�r�g�����M�ľ��x��dS���ܘ��⏽��D���t�ܘ����MdS���ų�ԭ�����Ŀ��w�e�飺

ʽ(10)�o���˳������c�D���ʵ��Pϵ���õ��˳������c�����C�D�١����M�ٶȵĶ����Pϵ������ƽ��ܘ������ʿ���ͨ�^�����C�D�ٺ����M�ٶȽyӋ�ó������@�ɂ���������������ƽ��ܘ�ʩ���r���ɼ��ġ��@�ӣ��Ϳ����g�ӌ��F����ƽ��ܘ��������Ķ������ơ���Ҫע��������������C����Ч�ʦǵ�Ӱ������^���^�࣬���H�Y�����ܕ��cʽ��l0)�Pϵ����ƫ�x������yӋҎ�������_�ģ�Ҳ���ܝM�����Ҫ��ġ����Č�ͨ�^ģ��ԇ��C������Փ�����_�ԡ�
4������ƽ��ܘ�ƽ���B�c��ƽ���B����
4.1����ƽ���B�r�ܘ�ʩ������ƥ��
�ܘ����M������ƽ���B�dz����ʞ�l00���r���������c���M��ԓ�_���ij�������ȵĠ�B������ʽ(10)���˕r�����C�D���c�ܘ����M�ٶ�֮�Ȟ飺

4.2���P���D��������Փ����
�ܘ��������c���M��ԓ�_�����ų�������ȕr��̎�ڲ�ƽ����M��B���F���yԇ�������ܘ����̎�ڵij����M��B����ǰ�����w�γɔD�����ڶܘ�ǰ���a������¡�𣬲���������һ�������Ȯa�����ӑ�������
���̎�ڳ�������ȫƽ���B(e=100��)�r��ǰ ���،�¡�������㣬�ܘ����܇����w�_����С����ô���˕r�Dz��Ǿ�һ���_����һ�Nƽ���B��?���ܘ��Ͳ����ДD�����ã��،���Ҳһ���]�и��ӑ���������?�ԈD3��ʾ���ʽ���P�����о��@�����}��
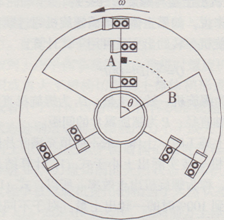
�D3���P�D��ǰ�����wʾ��D
�D�е��P���_���ʿɽ���Ӌ���l����/120�����P����Ͼ��A�ľ��x��r��һ�����wԪ��λ������ψA��AB�ϵ�A�c�����P�Խ��ٶ������D�r�����wԪ�M�����ǰ��������һ���_�ڲ��ֵ��_֮ǰ���wԪ��һֱ̎�ڔD����B���ܘ�ǰ�����w�����@����һ�Εr�g��̎�ڔD����B��Ȼ���P�������M�����}�ȣ�����������C�ų����D�����wԪ�ڵ��P�D���^�����ܔD���r�gT=��/�����t�D�����w�ڵ��P�D���^�����_�������D�����飺

ʽ�У���L�����wԪ�_�������D�������˞鵶�P���_���ʣ�v�����M�ٶȣ������xҊ�D3��
ʽ(l2)�f����
(1)���ڶܘ����P�������ã�ǰ�����wһֱ�ܵ������ԵĔD�����ã��@�N�D�������ǽ^���ġ����ԣ���ʹ�ܘ����M�r��������ƽ������^�ã����ʽ���P���M�rҲһֱ���ڸ��ӑ��������@�f��������ƽ��ܘ��ăɷNƽ���B������ȫ�ȃr������ܘ��_�����^С���ܘ��_������ƽ��r���������ĔD�����ã��ܘ��cǰ�����w�Ľ��|������������ˮ�������ɷNƽ���B������ƫ�x��ֻ�Ю��ܘ��_���ʷdz���r���ܘ��cǰ�����w���|��������ˮ������ƽ��ŕ��c������ƽ��ȃr��
(2)�ܘ����M���ٶȿ죬���P���D��Խ�����_����ԽС�����P���ĔD������Խ���@����֮���t�D������ԽС��
(3)�������ĔD�����ã����}����������cǰ�����w�Ľ��|���������^�������ԣ����ʽ�ܘ������}�����O��ֵ�������y��Ӌ�㣬��ɵ�һ�Nƽ���B�Ŀ��Ƙ˜ʲ����_��
���������������M����匦�����_���淀���������������ƶܘ�������Ӱ푲������������ܘ������x��Խ���н�(��)����r���x���^���_���ʵ��P�����P�D�������^�죬���M�ٶ������^���������������ڼ��н�(��)����ı��o����Ȼ���@��Ҫͨ�^���̌��`�Mһ����C��
5���������c�����C�D�١����M�ٶ��Pϵ������ƽ���B�rʩ������ƥ���ԇ����
5.1����ƽ��ܘ�ģ�Mԇ�śr
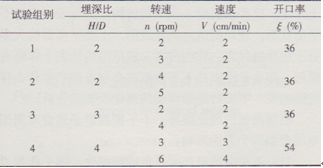
ԇ�������L���w����ߴ��2��4 m��2��4 m��1��2 m�����wһ���_��42 cm�ף��Ա�ģ�Ͷܘ���룻ģ������ƽ��ܘ�ֱ����40 cm�������C��������Y�����������P������ȡ������ͬ�S�Y�������P�_���ʿ��{������ԇ�r������36����54���ɷN�_���ʵĵ��P�����wԇ��b��Ҋ�D4�������C��ʽҊ�D5��ԇ����ӵ�������8��7 kPa����Ħ���Ǟ�22��6�㡣ԇ�����˲�ͬ����ȣ�ÿ�ξ��M���g�{�������C�D�١����M�ٶ�һ�Σ����wԇ���O��Ҋ��2��
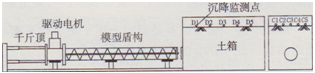
�D4ԇ��b�ÈD
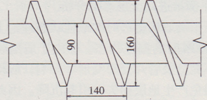
�D5ԇ������C��ʽ
��2ģ�Ͷܘ�ģ�Mԇ����
5.2�����ʡ������C�D���c���M�ٶ��Pϵԇ�Y���yӋ����
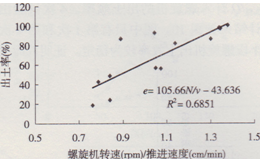
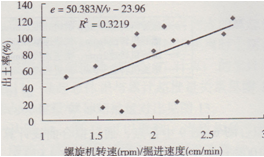
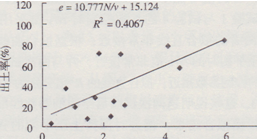
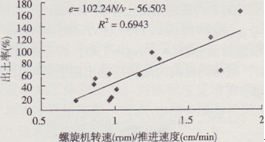
�yӋ����ԇ�����ʡ������C�D���c���M�ٶ��Pϵ���Y��Ҋ�D6���D7���D8���D9���ĈD�п��Կ������M��ԇ���M�Ŀ��L�Ⱥ̣ܶ��������c�����C�D��/���M�ٶ��зdz��õľ����Pϵ�����D7���D8�c���^�xɢ�����Č������M�н�ጡ�
�D6�����ʡ������C�D�١����M�ٶ��Pϵ(ԇ�l)
�D7�����ʡ������C�D�١����M�ٶ��Pϵ(ԇ�2)
�D8�����ʡ������C�D�١����M�ٶ��Pϵ(ԇ�3)
�D9 �����ʡ������C�D�١����M�ٶ��Pϵ(ԇ�4)
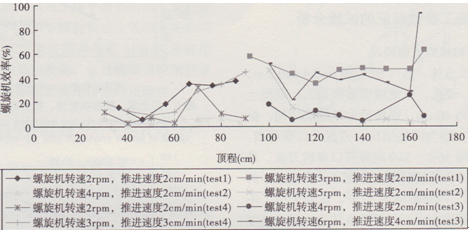
�����D5��ʽ(1)֪�����Cһ�D����Փ��������1923��45 cm³���Q�����Mһ�ξ��x(һ���10 cm)�����C�ų������أ�ȡ���Ӝy��������Ȼ���أ��Q��������Cһ�D�ų����ஔ����Ȼ��B�����w�w�e������=Q���H/QӋ�������C�ij���Ч�ʡ�4��ԇ����Ч�ʽyӋ�Y��Ҋ�D10���D��ֻ�е�l�κ͵�4��ԇ�ĺ��������C����Ч���^�鷀�����C���˕r�]�г��F���@�ĔD����ж�d���ã�ԇ�O�yҲ�����˕r���ӱ���]�����@��¡��ͳ�����ģ�Ͷܘ��ӽ����@������ƽ���B���˕r�������C�D���c���M�ٶ�֮�Ȟ�1.5��
�D10�����C����Ч�ʽyӋ
�M�ψD6���D9�и��c��ͨ�^�M������Ӌ���������l00��H���N/v�քe�飺l��4��2.5��7.9��1.5����Փ���@������������ƽ���B�r��N/v��������ԇ�r����ƥ�����ƫ�xƽ���B�^����ɳ���Ч�ʵIJ��������е�ֵ���ܲ�������ƽ���B�ą���ƥ��Y����ԇ�l�cԇ�4�ą������ƕrN/v��������l��1.5�����ߵĔM��ֱ���dz��ӽ��������M������Ӌ�������ƽ��r��N/vֵ�dz��ӽ������c�ɴ�ԇ�ĺ��εĿ��ƅ����ӽ����M��ֱ����R2ֵ�քe��0��6851��0.6943���@Щ�f���@�ɴ�ԇ���εą���ƥ���^�����������M�ϽY�������M�r��������ƽ���N/v��1.4��1.5���@�cǰ����������C����Ч�ʽyӋ�Y���ĽYՓһ�¡�
�����YՓ����ͨ�^����Ӌ����C���������D10����1��4��ԇ���Σ������C����Ч�ʦǡ�45���������C�ڕr�gT�ȵ���Փ�����w�e����ͨ�^��ʽӋ�㣺
Q�ų�=��qnt=45����l923��25NT=865��46NTcm³
����ǰ������� (N/v)B��l��45�������M�ٶȑ��� N/1��45���t��ͬ�r�g�ȶܘ����ų�����������ͨ�^��ʽӋ�㣺

�t�����ʞ�99��9�����ӽ�����ƽ���B���C������YՓ�����_�ԡ�
�@�ӾͿ��Խ�ገD���c�ӵ�ƫ�x��r��ԇ�1��ԇ�4�c�ӽӽ���������酢��ƥ��ӽ�ƽ���B��ԇ�2��ԇ�3�У�N/v��ֵ�ѽ��_��2��2��5������ƥ���ѽ��h�xƽ���B�������C����Ч�ʲ������������c���^���xɢ��
�C��������ģ��ԇ��Ǵ_������ƽ��ܘ�ƽ���B�r����ƥ��(��/v)B����Ч�ֶΡ�
6����ƽ�����M������Ӱ�ԇ����
6.1��ƽ�����M������Ӱ푷���
����ƽ��ܘ����M�r����Ѡ�B��Փ�ϑ�ԓ������ʞ�100���r�ľ��M��B�������ڶ�βÓ����ע�{�r��䲻��ּ���Ƭ����׃�ε�Ӱ푣��ܘ��Cͨ�^���ɱ���a���،ӓpʧ�������������ˣ�һ�㶼���Ƴ����ʞ�95����98����ʹ�ܘ�ǰ���،Ӯa������¡���ڶܘ�ͨ�^���ٳ��������ԜpС���M�r�،ӳ����Ľ^��ֵ��ǰ�������������ʹ�dz����ʞ�l00��������������ã��������ʽ���P�Ķܘ���Ȼ���a���D�����á��@Щ���Q������ƽ��ܘ����M̎��һ���IJ�ƽ���B���F���yԇ��ԇ����������ƽ��ܘ����̎�ڳ����M��B���ܘ�ǰ��һ�������ȵر����w����¡����ô�L���x�IJ�ƽ����M�������Ӯa��ʲô�ӵ�Ӱ���?���挦����Ԕ������Փ��ԇ������
����ǰ�����Փ�ƌ�����ƽ����M��Ȼ�����܇��،Ӯa���ɂ�����Ӱ푣�
(1)��ƽ�����M�a����ؓ�،ӓpʧ����ƽ����M�a���ĔD������ж�d�����a����ؓ�،ӓpʧ���M������ǰ�����w¡����������ƽ�ⳬ���M�r��ÿ��λ���M�L�Ȯa�������،ӓpʧ�ʞ��=dl/dS����֮�t�a��ؓ�ĵ،ӓpʧ���ڌ��Hʩ���У�һ������D���a�����ĵ،ӓpʧ���ڶ��N��r���F�^�١�
(2)��ƽ�����M�a����ǰ�����w�ĔD����ж�d���Ķ��a�����ӑ����������܇����w�a���_�ӡ�
����ƽ��ܘ����M�rһ��̎�ڳ����M��B������ǰ������������M��ǰ�����w�ĔD�����Á��ԃɂ����棺�������C������С�ڶܘ����M���ų������w���������ʽ���P�a���D�����á�
�D���a���ĸ��ӑ�������|�����c�����oֹ����������֮������_�ڲ��֣����ӑ���ֵ�飺
��p=kdl/dS=k�� (13)
ʽ�У��Ş��_�ڲ��ֵĔD���ʣ�k���Ƅ��ȣ���p���_��̎�ĸ��ӑ�����
�����������ã���岿�֔D���a���ĸ��ӑ���ֵ�����_�ڲ��֣����ǰ�����w�ܵ������ĔD�����飺

ʽ�У��š����岿�ֵĔD���ʣ���p������̎�ĸ��� ���������鵶�P�D���^������匦ǰ�����w�D����������ֵ���c���߲��á����|���Ե����P��С��l��
6.2��ƽ����M�a�������،ӓpʧԇ��о�
����ƽ��ܘ�������С�ڑ�ԓ�_���ij������r�����a����ǰ�����w�ĔD������ɵر�¡��Ŀǰ߀�]���о���ϵ�y�y�����о��^�ܘ������M�r�D�����w���c�ر�¡�������Pϵ��һ���J�錦���ܛ����������M�D�����w�w�e������ر�¡���w�e��������ԇ�ϵ�y�yԇ�˶ܘ����M�r���ӱ����¡�������������w�s��������ȣ����w¡��ķ����cʩ���F���������^�e����¡��Ŀ��w�e���c�F���ӽ��ġ�
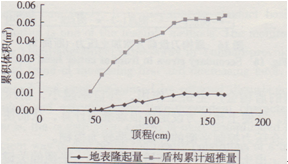
�D11�،���¡�����c�ܘ���Ӌ���������ȈD
�D12�،���¡�����c�ܘ���Ӌ���������ȈD
�D13�������c¡���������������ȈD
�y����ͬ���M���x�r�ĵر����y�c��¡�������M��Ӌ�����w¡����w�e����ͬ���M���x�r���ӱ����¡���w�e�c������(��ʽ��7)Ӌ��)����Ӌֵ����Ҋ�D11��¡���w�e�c��Ӌ�������PϵҊ�Dl2���������c¡����/��Ӌ����������Ҋ�Dl3��
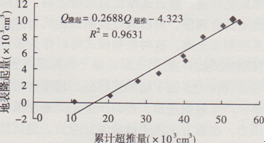
�ĈD11���D12���Կ��������ܘ�̎�ڳ����M�r���S�����w�D���������ӣ��،�Ѹ��¡�𣬲���¡���������c����������֮��څ��һ����ֵ����0.27��ԇ�Y���f������ƽ��ܘ��ر�¡����С�ڶܘ������M�a���ĔD�����������M����������400�ܘ������2D�r���،�¡�����鳬���M����27����
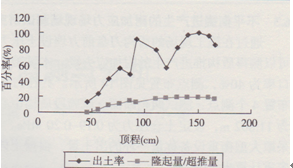
�ĈD11���D13���Կ��������ܘ��Խӽ�����ƽ���B���M�r(80����l00��)����Ӌ�������͵ر�¡�����lչ�ٶ�׃�����ĈDl3�������S�������ʝu�u�ӽ�100�����ر�¡�����İlչ�ٶ�Խ��Խ�������������_������ƽ���B�r���ر�¡�������ٰlչ���ĈD13߀���Կ������������ʲ����������F���ӕr���M�ܵر�¡����Ҳ���в��ӣ������ӷ��ȷdz�С���f���ر�׃�����܉��m����������һ�������Ȳ��ӵġ�
�D11�͈Dl3߀������픳�50��92 cm�r���ܘ�һֱ̎�ڔD�����M��B�����A�εر�¡��Ѹ�ٰlչ����¡����/�������s��0��26�����ӵ�l2��86�����f���D�����ڱM�ܳ����ʷdz�С���D�����ܴر�¡��ռ��Ӌ�������s��С���@���Y���C���ܘ��D���rһ���֔D����������w�e��׃�����w�e��׃���ӵ�һ��ֵ�r���ر����_ʼ¡�𡣈D12�ДM�Ͼ��c�M�S���c����a���ر�¡��ǰ�����D������
���ϽYՓ�f�����ܘ������M�D����dV�D����ֻ��һ���֮a����¡����ֵ���dV�D�������Q����Ч�،ӓpʧ�ʣ������Ӷܘ���͡��������ԡ������һ���r���鶨ֵ��߀��һ���֮a�����w�e׃�Σ�׃������(1һ��)dV�D�����w�e��׃��lһ����
�ر�׃��Ӌ��һ������S�C���|��Փ��������ԇ�Y����ԓ��Փ���،ӓpʧ��ԓ���æ�dVӋ�㡣
6.3��ƽ����M�a���ĸ��ӑ������F���yԇ�о�
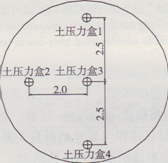
ͨ�^��ʩ���F���Ķܘ����Pǰ�����O�������y�c���Ԝy�öܘ����M�a���ĸ��ӑ���������ԇ�ܘ��_���ʞ�40�����y�c����Ҋ�Dl4��ʾ�����ڵ��Pǰ������4���y�c���yԇ�ɂ����档ԇ�ζܘ����������11��802 m���O�����}������0.19��0.20 MPa��ͬ�r����ȡ���ͺ����O��Q��һ�h�ij��������������w��Ȼ����Ӌ������ʡ�
�ܘ��cǰ�����|�����飺p+����p+(1һ��)��p�䡣�����yԇ�Y����ǰʽ��֪�_����ԽС�ܘ��D��Ч��Խ���@���a���ĸ��ӑ���Խ��
���˽yӋ�ܘ����M�����w��Ӱ푣��yӋ�r�۳����ij�ʼ�����������ؑ�����ֻ���]�ܘ���ƽ����M�a���ĸ��ӑ��������yԇ�Y��Ҋ�Dl5���Dl6���yԇ�Y���@ʾ�����еĸ��ӑ������ܘ����y�c1��5D���ҕr�_ʼ���@׃�������S���x�Ľӽ��������ӽ����r�_�����ֵ���˕r�ĸ��ӑ���ֵ�h��ͨ���J��ĸ�����(0��02 MPa)������Ϯa���ĸ������_��0.17��0.19 MPa������ʽ(13)��(14)��p+��p��)/��p+��p)=1.89��1.95��P��،ӵ��oֹ����������������ϵĉ��������}�ȉ�����1.89��1.95����ԇ�Y���f�������ʽ�ܘ����M�r�D��Ч���h������Ĵ����������yӋ�Y�����ܘ����H�����ʞ�99�����f���˕r�ܘ��dz��ӽ�������ƽ���B�����yԇ�Y���������д��ڷdz���ĸ��ӑ������f�����ڵ��P�D�����ã��ܘ��cǰ�����w�Ľ��|��������ˮ��������̎��ƽ���B���yԇ�Y���f���ɷNƽ���B��������ȫ�ȃr�ģ��C����ǰ���P�����D��Ч�����������_�ԡ�
�D14 m6.34 mm�ܘ����Pǰ�y�c����
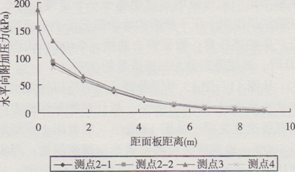
�D15�ܘ����Pǰ������������(����l)
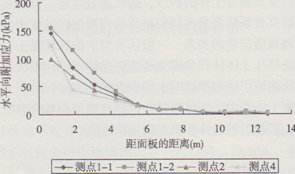
�D16�ܘ����Pǰ������������(����2)
7���Y�Z
����ϵ�y���Y������ƽ��ܘ����M�r��ƽ�������Փ���������ƽ��ɷN��B�ĸ����Փ�������ʽ���P�����ɷNƽ���B�IJ��ȃr�ԡ�ԓ��Փ�����ˌ�����ƽ��ܘ�ƽ���B���J�R���鱣�o�h���r��ʩ������ȡֵ�ṩ��������
����ƽ��ܘ����M�r����������C�ų����c�ܘ����M����������ȣ��ܘ�̎�ڳ�����ƽ���B���ܘ��a���ĵ،ӓpʧ��С���˕r������������ã��ܘ�߀���������γɸ��ӑ���������ɶܘ��cǰ�����w���|�����c��ˮ������ƫ�x�������_�����^С�����ʽ���P�Ķܘ����a���D�����ã��_����ԽС���D��Խ���@���@ʹ���}�����O��ֵ���y�ʴ_Ӌ�㣬�Ķ�ʹͨ�^���}��������ƽ��Ŀ��Ƙ˜��^��ģ����
������������ƽ��ܘ��S�ֳ���ƽ����P�I����ֱ�ӿ��Ƴ������^�y�������������������C�D��/���M�ٶȡ������ض������ӡ������C����������ƽ�����M�������C�D�١����M�ٶȱ�ֵ���ض��ģ�����ͨ�^ԇ�_�������ֵ������ͨ�^���������C�c���M�ٶ��g�Pϵ���Ƴ����ʣ��@�N����ģʽ��������������}��������ģʽ���a�䡣
�F���ܘ����̎�ڳ����M��B�������M����ɃɷN������a�������M�����M���a�����ĵ،ӓpʧ���a���D��������ǰ�����w����ɸ��ӑ������yԇ�Y���������ܘ��a���ij����M��һ���֮a�����w�e��׃��һ���֮a�������ĵ،ӓpʧ�������˵ر�¡�𣻸��ӑ��������@��һ���J���ֵ���_����40��������ϵ����������_�����}�����ăɱ����C�������ĔD�����á�
�����īI
[1]��W�Y���X�_�ʣ����ֵ�,ܛ������ʩ���¼��g���Ϸʣ����տƌW���g�����磬1999
[2]���ˇ��c,�ܘ�ʩ�����g���Ϻ����Ϻ��ƌW���g�īI�����磬1990
[3]�����£�������������ƽ��ܘ����M�Ĕ��W����ģ�ͼ��������g�Pϵ�о�����ľ���̌W��2006
[4]�����䣬���ı���ʯ���¡��ǘ˜ʙCе�O���OӋ�փԡ��������Cе���I�����磬2005
(���ā�Դ�����ʡ��ľ�����W�� �ď��W�j�����S�S �� �ď� ����)
