
 ϵ�҂�...
ϵ�҂�...  �A��܇��ʩ���r�˸߿��Ƶĵȷ�ֱ...
�A��܇��ʩ���r�˸߿��Ƶĵȷ�ֱ...  �¼��gIDITI ���������S���ػ�̎...
�¼��gIDITI ���������S���ػ�̎...  �h�L�����zַ���o�^���ü��_�lס...
�h�L�����zַ���o�^���ü��_�lס...  ��У���A�Oʩ���OBOT�Ŀ�о�...
��У���A�Oʩ���OBOT�Ŀ�о�...  �����ľ�����W����...
�����ľ�����W����...  ���䉺��ɰʯ�|���������^��ʩ...
���䉺��ɰʯ�|���������^��ʩ...  ��̼���н��O��������̽���c���`...
��̼���н��O��������̽���c���`...  �\Մ�Ї��Ŵ����������c�����İl...
�\Մ�Ї��Ŵ����������c�����İl...  �h�L�����zַ���o�^�Ȱ��ü��_�l...
�h�L�����zַ���o�^�Ȱ��ü��_�l...  ���Ͱl늙C���Ļ��Σ�U��e��...
���Ͱl늙C���Ļ��Σ�U��e��...  ������͙Cе�S����Ҏ���OӋ...
������͙Cе�S����Ҏ���OӋ...  ����ʮλ������������B������Ʒ...
����ʮλ������������B������Ʒ...  ����������ˇ�g�^�����OӋ��һ��...
����������ˇ�g�^�����OӋ��һ��...  ���u��������Ƽ���������OӋ...
���u��������Ƽ���������OӋ... ��x 8378 �� �ؽ�ϴú�ܶȿ���ϵ�y���OӋ
�ؽ�ϴú�ܶȿ���ϵ�y���OӋ
����
����W�пƼ��lչ����˾ �]����710043
��ú�V�_�ɳ�����ԭú����麬��ʯ��ú�࣬������ȫ�M�㲿���Ñ���ʹ��Ҫ����Ҫ��ԭú���^�xϴ���ֳɾ�ú����ú����ʯ��ȥ��ú�࣬ԭú�xϴ֮����Խ���ԭú�Ļҷ֣���֣����ԭú��Ʒ�|�������tú�ğ�ֵ��Ҳ������ú̿�aƷ�ɆνY�������|�����Ʒ�N�����|���D׃�����F�aƷ�ă��|����ͬ�r�p��ԭú���\ݔ���\�����M��������߽���Ч�ʣ����ܝ�����
�������҇�ԭú��ϴ������^�죬�����Ǹ�Ч���ؽ��|�xú�lչ�ܿ�,���xú��ˇ����ռ������������45%���ң����ؽ��xú�Ԅӻ����gҲ�õ�Ѹ�Ͱlչ��
һ���ؽ�ϴúԭ�����M��
1.����ԭ����
�ؽ�ϴú�������˰�����ԭ��������ú����ʯ���ܶȶ�����1����˲���ֱ����ˮ�з��x��Ҫ�댍�F���ܶȷ��x������Ҫ���м��ĵV���|��ú��ˮ���ó�һ���ܶȵđҸ�Һ�����˱����@�N�V���|�Ļ��պ͙z�y���x���˴��F�V�ۣ����ϸ�Ҹ�Һ��һ���ĉ������н��M�����aƷ�������������������γ�һ����ֱ�����F�η��x�棬���x�������������������£���ú����ú����ʯ�Ҹ��ڲ�ͬ�Č��棬����Һ�w�ܶȵ��³���С��Һ�w�ܶȵ��ϸ����Ķ����F���x��
2.�ܿ�ϵ�y�M�ɣ�
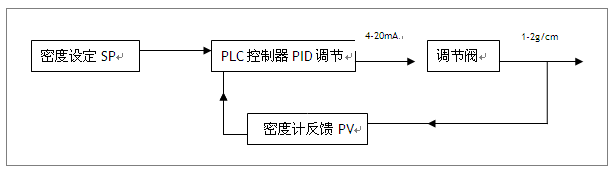
�ؽ�ϴúϵ�y�֞�ԭúϵ�y����ϴϵ�y�����xϵ�y�͝�sϵ�y��������ϴϵ�y�е��ܶȿ����������ؽ�ϴú�ĺ��ģ��ܿ�ϵ�y������λ�C��PLC�����������x���������ܶ�Ӌ�������ﺬ��Ӌ���aˮ늄��{���y������ҺλӋ����������ЙC�������|�õ��O�䣬�ܶȿ���Ч���ĺÉ�ֱ��Ӱ푵�ϴú���|����
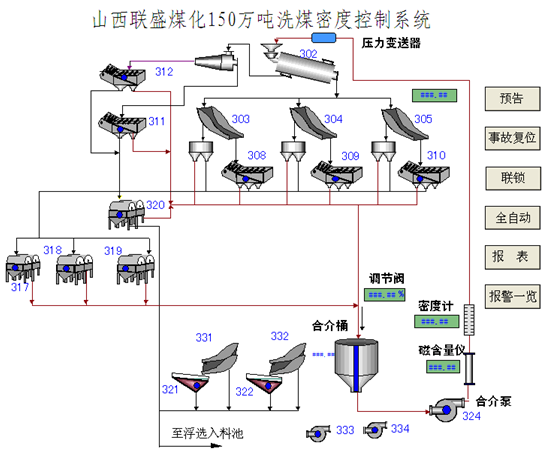
�ܶȿ���ϵ�y�D
�����ؽ�ϴú�ܿ�ϵ�y����
1.������
�ؽ�ϴú���ܿ�ϵ�y��һ�������������΄գ����O��ͬ�r���c�O�أ�����Ҫ�����ڰl��ϵ�y�Ȕ_�ӕr�ܿ��ٷ�����������ԭú�Ļҷ֣��������Ȱl��׃���r�����Ԅ��{������ϵ�y�ԝM��͑ҷֵ�Ҫ��ϵ�yPLC�x�����T��300ϵ�ЮaƷ���������������ö��������ܙz�y���g������PID�Ŀ����ֶΣ��Ͷ��΄յľC��ƽ��Ŀ��Ʒ�ʽʹϵ�y����ѭ�h���x��GE��˾��IFIX3.5����λ�O��ܛ����PLC��Ӌ��C����̫�WͨӍ�����Fȫ�S���Ԅӻ��O�أ���
2.��Ҫ�z�y�x����
�����ܶ�Ӌ��
٤���侀���^���|�r�����ڹ��Ч����ɢ��Ч���������侀���ȵĜp������p���̶Ⱥ����|���ܶ�֮�g��ѭָ�����ɡ������ܶ�Ӌ�������@һԭ�팦�ܵ��еđҸ�Һ����M�Мy���ġ���ϵ�y�x������ұ���о�Ժ���Ƶ�AMDEL�����ܶ�Ӌ���܊Aʽ���b���ǽ��|�y���� 4-20mA��̖ݔ�������� 0.5-8g/cm3
����Һλ��
�����y�������l��������ϵK�ﷴ������յĕr�g��Ӌ����l���c���ϵK��Č��H���x������ҺλӋ���������@��ԭ��y��Һλ�ġ���Ҫ�����xú�S�ĺϸ���|Ͱ��ú����Ͱ��ϡ��Ͱ��ú��Ͱ��Һλ�y������ϵ�y�x�õ���E+H����ҺλӋ������1-6�ס�
�����ﺬ���y��Ӌ��
�ؽ��|�xú�r�đҸ�Һ�ɴ��F�V���cˮ���ƶ���,������ϴ�x�^���е�ú��,����ˮ��ú���ǷǴ������|������F�V�ی����ʱ��^�ߣ�����ֲ��ڑҸ�Һ�У��ؽ��|�Ҹ�Һ����һ���Б���Ȧ�r����Ȧ��늸����l��׃�������c�Ҹ�Һ�Ĵ��F�V�ۺ��������ȡ��ɴ˶��z�y�������ﺬ��ֵ����ϵ�y�x����ɽú�з�Ժ�OӋ�ģã��ʹ����ﺬ���x���`���ȱ��^�ߣ����̞�0-1000mg/L��
����׃������
��Ҫ�����DZO�y��������ډ�������ϵ�y�x�����T�ӵ�PMC����׃����������0-0.6MPa
3.����ϵ�y��
3.1��Ӳ���x��
�ɾ������������PLC�������T�ӹ�˾��300ϵ�ЮaƷ��
��λ�O��ܛ��������GE��˾��IFIX3.5
3.2�������㉺���Ͽ���
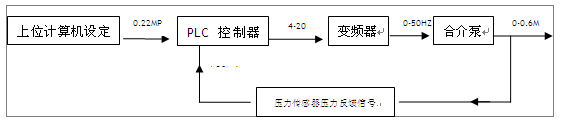
�����������ßo���o�Ϸ�ʽ���Ҹ�Һ�ý��|�É����������γ����u��������������ډ��������ߣ����Լ��ٷ��x���^�̣����ǣ��S�����ω����^�m���ӣ��Ҹ�Һ�ֲ����������׳��F�Ҹ�Һ��s�����xЧ���½�����������ډ����^С������ɑҸ�Һ�o�����d�d�w�\�D����Ą�������������������ډ����������ں��������ȡ�һ�㱣�ֺ㉺���ƣ��Ա��Cϵ�y�ķ�������ϵ�y���|�ò���׃�l�����ƣ����w늙C������늉��ȼ���10KV�����ʣ�560KW,�~�����43A����������ډ���������0.22MPa��
�F�������������z�y��0-0.6MPaģ�M��̖�����^PLC��A/D�D�Q��4-20mA��̖�D�Q��0-27648����������FC105�K��0-27648�D�Q��׃�����������������@���D�Q��Č�������������FB41���Q���B�m���Ƶ�PID���ą���ݔ�룬�@��PID�������@������ݔ�루��Ŀ��ֵ������λӋ��C�ĉ����o��ֵ���^Ӌ��PID�Ŀ��������˿��������^ģ�M��ݔ��ģ�K�D�Q��4-20mAݔ����׃�l����׃�l������PLC��ݔ����̖����ݔ��0��50HZ���l����̖���ƺϽ���D�٣����F�]�h���ƣ��Ķ��_��������ډ�����Ŀ�ġ�
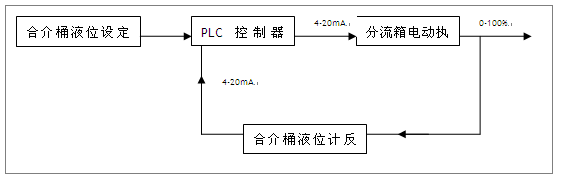
3.3�Ͻ�ͰҺλ�Ŀ��ƣ�
�Ͻ�Ͱ��Һλ����Ҳ���ؽ��|���x�^���е���Ҫ�h����Һλ�^�ߣ�������ܽ飬Һλ�^�ͣ�����ɴ�ձìF���ܶȲ���������ϵ�y�_����Ͻ�ͰҺλ������1.5��2.5m֮�g����ϵ�y�z�y���Ͻ�ͰҺλ�͕r����PLC��PID�{�����{��ݔ��4-20mA��̖�o�aˮ�{���y���aˮ�{���y����4-20mA��̖�D�Q��0-100%�_�ȣ��Ԅ��a��ˮ���ӽ���P�������_���Ԝp�ٷ�����ϡ��Ͱ�đҸ�Һ�����Ͻ�ͰҺλ�ߕr�����_�������_���������������ͣ܇ǰ�Ѻϸ���|ͰҺλ�{��1.5m����,��ֹͣ�Õr�����|Ͱ������
�Ҹ�Һ����Һ���������|Ͱ�r��Һ�w���R�������y����ɸɔ_����Ҫ��DN400����Ͱ����D��

3.4ѭ�h�Ҹ�Һú�ຬ������
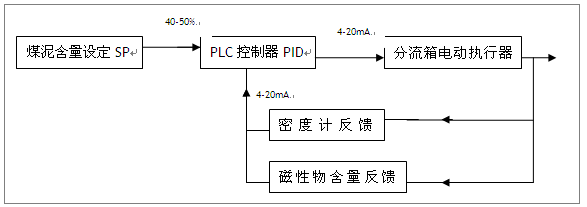
�ؽ��xú��ˇҪ��ϸ�Ҹ�Һ��ú�ຬ����һ���m���ķ����ȣ�ú�ຬ��̫�ͣ��Ҹ�Һճ�Ȳ������ם�s�����ϴ������ú�ҷ�ƫ�ߣ�ú�ຬ��̫�ߣ������ھ�ú����ú����ʯ�ķӣ����������ģ�ϵ�y��ú�ຬ���Ǹ��������ﺬ�����ܶ�ֵ����Ӌ��ó��ģ�ú�ຬ������λӋ��C��ݔ�룬ͨ�^PLC��PID�{����ݔ��4-20mA��̖�ӷ�������_�ȣ��γ��]�h���ơ���ϵ�yӋ���ú�ຬ�����ڹ�ˇҪ��r���p�پ�ú���κY�·�������_�Ȝp�ٷ���������ϵ�y�е�ú�ຬ���^�ߕr��ͨ�^��������k������ú�ຬ���Ķ��Ԅ��{���Ҹ�Һ��ճ�ȣ���߷��xЧ���������ﺬ��Ӌ���ܶ�Ӌ�Ĝy���c��������ЙC���]�h������ϵ�y��ú�ຬ�����Ʒ�����40-50%�ķ����ȡ�
ú�ຬ��Ӌ�㹫ʽ��G=A(P-1000)BF,ʽ�У�
G��ú�ຬ����kg/m3��
F������ﺬ����kg/m3��
P��Ҹ�Һ�ܶȣ�kg/m3��
A���cú�����P��ϵ����A=��ú��/����ú��-1000����
B���cú��ʹ��������P��ϵ����B���Ĵ�/���Ĵ�-1000����
���У���ú�ࣽ1450kg/m3���Ĵţ�4500kg/m3��Ӌ��ó�A=3.22��B=1.29��
ú�ຬ��Ӌ�㹫ʽ�飺G=3.22(P-1000)1.29F
�ڲ�ͬ�ĺϸ���|�ܶȺ�ú�ຬ���´����ﺬ�������Pϵ��Ҋ���D
3.5ѭ�h�Ҹ�Һ�ܶȿ��ƣ�
�����������γ�һ����ֱ�����F�η��x�棬���x�������������������£���ú����ú����ʯ�Ҹ��ڲ�ͬ�Č��棬����Һ�w�ܶȵ��³���С��Һ�w�ܶȵ��ϸ����Ķ����F���x���ϸ�đҸ�Һ�ܶ����ؽ�ϴú���P�I��ֻ�кϸ�đҸ�Һ�ܶȲſ���ʹ�о�ú����ú����ʯ���x�������������кܺõđҸ��ڲ�ͬ�Č��棬���ھ��_���x�������͑���Ҫú�Ļҷ�Ҫ�����ϴԭú�Ļҷֺ�ú�ຬ���Ĕ����C��Ӌ�㣬Ӌ������ΑҸ�Һ���ܶ�Ҫ����������λӋ��C��ݔ���ܶ��O��ֵ�����|�����й�·�ϵ��ܶ�ֵ�����Ҹ�Һ���ܶȸߕr���Ԅ��{���Ͻ�ó����{���y���_�ȣ�0-100%���a����ˮ���ܶȵ͕r���a�Ӹɴ��F�V������ܶȣ�����÷������k���o���Ͻ�Ͱ���ܶȿ��ơ�
3.6���^�O��
�ڿ���ϵ�y�У���ƫ����^С�r���O��ƽ��������������ϵ�yС����ʎ���o�O�䎧��Σ������Դ�����M���Ŀ��Ƶ�Ҫ����f�������^��PID���ƿ��Է�ֹ���φ��}�����˞���O��һ�����`��^���O��ֵ�c�^��ֵ�Ľ^����ֵС�����^�O��ֵ�r���p�����г�����ݔ����������PI�{�������O��ֵ�c�^��ֵ�Ľ^����ֵ�������^�O��ֵ�r����������PI�^�m�{����
3.7 PID�{������
����PLC��PID���]�h�Ԅӿ����ܽ�Qϵ�y�ķ����ԡ������Ժ͜ʴ_�ԡ�PID�������ą��������ǿ���ϵ�y�OӋ�ĺ��ă��ݡ�
a.���ȴ_��PID��������P������ �ı���ϵ�����x��һ�����̵IJɘ�����ϵ�y����������ȥ��PID�ķe��헺���헣���Ti=0��Td=0���H����������ƭh����ֱ��ϵ�y��ݔ����A�S푑����F�R����ʎ���ٷ��^�����Ĵ˕r�ı�������P��u�pС��ֱ��ϵ�y��ʎ��ʧ��ӛ䛴˕r�ı�������P���O��PID�ı�������P�鮔ǰֵ��60%~70%����������P�{ԇ��ɡ�
b.�_���e�֕r�g����Ti ,��������P�_�����O��һ���^��ķe�֕r�g����Ti�ij�ֵ��Ȼ����u�pСTi��ֱ��ϵ�y���F��ʎ��֮���ڷ��^������u�Ӵ�Ti��ֱ��ϵ�y��ʎ��ʧ��ӛ䛴˕r��Ti���O��PID�ķe�֕r�g����Ti�鮔ǰֵ��150%~180%���e�֕r�g����Ti�{ԇ��ɡ�
��ϵ�y����ϵ�y���d�����d�{����K�_��PI������
�ġ��ϡ���λܛ��ϵ�y
4.1��λ�O��ܛ��
���Ŀ��������GE��˾ iFix3.5ܛ�����M�B���㣬�������ĈD�νM�B������M�B�ȹ��ܡ�����ϵ�yͨ�^��λ�O��ϵ�y���ϵ�y�O�ز������^�̿��ƣ��O��ϵ�yͨ�^��̫�W��PLC�xȡ�F���O��Ġ�B����Ϣ�@ʾ�ڲ����T����վ�ʹ���Ļ�@ʾ���ϣ��@ʾ��ò���ֽM�����̺Ͳ������棬�@ʾ���r�͚vʷڅ�݈D�������r�͚vʷ�D���ȡ�
�O��ܛ����ϴú̎���^�̌��r�ӑB�O���⣬߀ӛ��ܿ�ϵ�y�еĸ���������z�yֵ��Ӌ�㔵�����yӋ���M���ԄӴ惦���@ʾ�ʹ�ӡ�������M�Кvʷ������ԃ��
���Fϵ�y�ą����O�ú��{�����l���{�ȿ�������
�����ΈD�������D������ȷ�ʽ�@ʾ���r����

4.2��λ����ܛ��
STEP7������SIMATIC�ɾ���߉�������M�B�;��̵Ę˜�ܛ��������S7-300�ľ��̣���ܛ���п���Ӳ���M�B��ͨӍ�B�ӣ������ƣ��yԇ�����d��ͬ�r����Ӳ���\��ܣ�STEPܛ���Ļ��ڮ�ǰ����ˮƽ���˙C���ƹ����OӋ��ʹ��Syombol Editor ���Թ������еĹ�����̖������CPU߀�����@ʾ���^���еĹ���ԭ���@ʾѭ�h�r�g���@ʾ���ܔ��������ܵ�ݔ��/ݔ����λ�惦��Ӌ���������r���͉K�Ĕ�����ͬ�r߀���ھ��������ܣ�ʹ�����{ԇ�p�����磬
�塢�YՓ��
�ܿ�ϵ�y���dž�һ�Ćλ�·���ƣ��Ƕ��·�ľC�Ͽ��ƺ����w�f�{�^�̣����C��������ډ�����ǰ���£��ܶȿ��Ƶ�ͬ�r�f�{Һλ��ú�ຬ���Ŀ��ƣ�Һλ��ú�ຬ����һ���������ƣ��ܿ���һ����С�������^�ľ��_���ơ����^�F���\�Ќ��`�����ܿ�ϵ�y����ȫ���Cϴú���|��Ҫ��ϵ�y�������\�пɿ���
�����īI:
1.���xú�S�OӋ�փ� ����ú̿���I�����磬2005��
2.�� �x�V�S�OӋ�����Y�ϡ���ұ�I�����磬2003
3.����OPC��ϴú�ܶȿ���ϵ�y���OӋ�c���F
4.����ϵ�yPID�����OӋ�c�{ԇ��2008
5.step7-300���ΈD�փ�
���1
FB41�Q���B�m���Ƶ�PID���ڿ����B�m׃����ģ�M����
PID�ij�ʼ������ͨ�^��OB100���{��һ�Σ�������COM-RST��λ�� PID���{�ÿ�����OB35����ɣ�һ���O�Õr�g��200MS��
�Y�ώ����ęn�е�PID��D�о����µą������������°빦����Ч������������
A.���е�ݔ�녢����
COM_RST: BOOL: ������PID����ԓλTURE�r��PID�����؆��ӹ��ܣ���λPID �Ȳ�������Ĭ�Jֵ��ͨ����ϵ�y�؆��ӕr����һ���������ڣ�����PID�M��� ��B��Ҫ�˳��r���@��λ��
MAN_ON:BOOL���@��λ��PID���ք�/�Ԅ��ГQλ���ք�ֵON����ԓλ��TURE�r��PID���܉Kֱ�ӌ�MAN��ֵݔ����LMN��
PEPER_ON�� BOOL���^��׃�����ֵON���^��׃��������������PID��ֱ��ʹ���^��׃��PI�������]����Ҳ��ʹ�� PIWҎ���ֵ�����ã�����ˣ��@��λ��FALSE��
P_SEL��BOOL�������x��λ��ԓλON�r���x��P��������������Ч��һ���x����Ч��
I_SEL�� BOOL���e���x��λ��ԓλON�r���x��I���e�֣�������Ч��һ���x����Ч��
INT_HOLD BOOL���e�ֱ��֣���ȥ�O������
I_ITL_ON BOOL���e�ֳ�ֵ��Ч��I-ITLVAL���e�ֳ�ֵ��׃�����@��λ����������λON�r���tʹ��I-ITLVAL׃���e�ֳ�ֵ��һ�㮔�l�FPID���ܵķe��ֵ���L���^����ϵ�y��������r���Կ��]ʹ�÷e�ֳ�ֵ��
D_SEL �� BOOL�����x��λ��ԓλON�r���x��D���֣�������Ч��һ��Ŀ���ϵ�y���ã�
CYCLE �� TIME��PID�ɘ����ڣ�һ���O��200MS��
SP_INT�� REAL��PID�Ľo��ֵ��
PV_IN �� REAL��PID�ķ���ֵ��Ҳ�Q�^��׃������
PV_PER�� WORD��δ��Ҏ�ķ���ֵ����PEPER-ON�x����Ч���������]��
MAN �� REAL���ք�ֵ����MAN-ON�x����Ч��
GAIN �� REAL���������棻
TI �� TIME���e�֕r�g��
TD �� TIME���֕r�g��
TM_LAG�� TIME���������P��
DEADB_W�� REAL�����^���ȣ����ݔ����ƽ���c����С������ʎ�����Կ��]�����^�������`���ȣ�
LMN_HLM�� REAL��PID�ϘO�ޣ�һ����100%��
LMN_LLM�� REAL��PID�O�ޣ�һ���0%�������Ҫ�p�O���{�����t���O�Þ�-100%������ؓ10Vݔ�����ǵ��͵��p�O��ݔ�����˕r��Ҫ�O��-100%����
PV_FAC�� REAL���^��׃����������
PV_OFF�� REAL���^��׃��ƫ��ֵ��OFFSET��
LMN_FAC�� REAL��PIDݔ��ֵ�������ӣ�
LMN_OFF�� REAL��PIDݔ��ֵƫ��ֵ��OFFSET����
I_ITLVAL��REAL��PID�ķe�ֳ�ֵ����I-ITL-ON�x����Ч��
DISV ��REAL�����S�Ĕ_������ǰ�����Ƽ��룬һ�㲻�O�ã�
B������ݔ�������f����
LMN ��REAL��PIDݔ����
LMN_P ��REAL��PIDݔ����P�ķ����������������{ԇ�^�����^��Ч����
LMN_I ��REAL��PIDݔ����I�ķ����������������{ԇ�^�����^��Ч����
LMN_D ��REAL��PIDݔ����D�ķ����������������{ԇ�^�����^��Ч����
Ҏ�ķ���������׃��������ռ����ֵ���ȵİٷֱ� �����c27648�����������ȵ���������ݔ��ͷ������У�׃��*100/27648��Ȼ�Y�����͵�PV-IN��SP-INT,����ݔ��׃�� �����У�LMN*27648/100��Ȼ�Y��ȡ�����ͽoPQW���� ��
|
���2���ڲ�ͬ�ĺϸ���|�ܶȺ�ú�ຬ���´����ﺬ�������Pϵ�� |
|||||||||||||||||||||||
|
1�����O�Ĵ�������w�ܶȞ�4.25g/cm3��ú����w�ܶȞ�1.45g/cm3 |
|||||||||||||||||||||||
|
�����ﺬ��(g/L) |
�ϸ���|�ܶ�(g/cm3) |
||||||||||||||||||||||
|
1.05 |
1.1 |
1.15 |
1.2 |
1.25 |
1.3 |
1.35 |
1.4 |
1.45 |
1.5 |
1.55 |
1.6 |
1.65 |
1.7 |
1.75 |
1.8 |
1.85 |
1.9 |
1.95 |
2 |
2.05 |
2.1 |
||
|
ú�ຬ��(%) |
0 |
65 |
131 |
196 |
262 |
327 |
392 |
458 |
523 |
588 |
654 |
719 |
785 |
850 |
915 |
981 |
1046 |
1112 |
1177 |
1242 |
1308 |
1373 |
1438 |
|
5 |
64 |
128 |
192 |
256 |
320 |
384 |
448 |
512 |
576 |
640 |
704 |
768 |
832 |
896 |
960 |
1024 |
1088 |
1152 |
1216 |
1280 |
1344 |
1408 |
|
|
10 |
63 |
125 |
188 |
250 |
313 |
375 |
438 |
501 |
563 |
626 |
688 |
751 |
813 |
876 |
938 |
1001 |
1064 |
1126 |
1189 |
1251 |
1314 |
1376 |
|
|
15 |
61 |
122 |
183 |
244 |
305 |
366 |
427 |
488 |
549 |
610 |
671 |
732 |
793 |
854 |
915 |
976 |
1037 |
1098 |
1159 |
1220 |
1281 |
1342 |
|
|
20 |
59 |
119 |
178 |
237 |
297 |
356 |
416 |
475 |
534 |
594 |
653 |
712 |
772 |
831 |
890 |
950 |
1009 |
1069 |
1128 |
1187 |
1247 |
1306 |
|
|
25 |
58 |
115 |
173 |
230 |
288 |
346 |
403 |
461 |
518 |
576 |
634 |
691 |
749 |
806 |
864 |
921 |
979 |
1037 |
1094 |
1152 |
1209 |
1267 |
|
|
30 |
56 |
111 |
167 |
223 |
278 |
334 |
390 |
446 |
501 |
557 |
613 |
668 |
724 |
780 |
835 |
891 |
947 |
1003 |
1058 |
1114 |
1170 |
1225 |
|
|
35 |
54 |
107 |
161 |
215 |
268 |
322 |
376 |
429 |
483 |
537 |
590 |
644 |
698 |
751 |
805 |
859 |
912 |
966 |
1020 |
1073 |
1127 |
1180 |
|
|
40 |
51 |
103 |
154 |
206 |
257 |
309 |
360 |
412 |
463 |
515 |
566 |
618 |
669 |
720 |
772 |
823 |
875 |
926 |
978 |
1029 |
1081 |
1132 |
|
|
45 |
49 |
98 |
147 |
196 |
245 |
295 |
344 |
393 |
442 |
491 |
540 |
589 |
638 |
687 |
736 |
785 |
834 |
884 |
933 |
982 |
1031 |
1080 |
|
|
50 |
47 |
93 |
140 |
186 |
233 |
279 |
326 |
372 |
419 |
465 |
512 |
558 |
605 |
651 |
698 |
744 |
791 |
837 |
884 |
930 |
977 |
1023 |
|
|
55 |
44 |
87 |
131 |
175 |
219 |
262 |
306 |
350 |
393 |
437 |
481 |
524 |
568 |
612 |
656 |
699 |
743 |
787 |
830 |
874 |
918 |
962 |
|
|
60 |
41 |
81 |
122 |
163 |
203 |
244 |
285 |
325 |
366 |
406 |
447 |
488 |
528 |
569 |
610 |
650 |
691 |
732 |
772 |
813 |
854 |
894 |
|
|
65 |
37 |
75 |
112 |
149 |
186 |
224 |
261 |
298 |
336 |
373 |
410 |
447 |
485 |
522 |
559 |
597 |
634 |
671 |
708 |
746 |
783 |
820 |
|
|
70 |
34 |
67 |
101 |
134 |
168 |
201 |
235 |
269 |
302 |
336 |
369 |
403 |
437 |
470 |
504 |
537 |
571 |
604 |
638 |
672 |
705 |
739 |
|
|
75 |
29 |
59 |
88 |
118 |
147 |
177 |
206 |
236 |
265 |
295 |
324 |
354 |
383 |
413 |
442 |
472 |
501 |
531 |
560 |
590 |
619 |
649 |
|
|
80 |
25 |
50 |
75 |
100 |
125 |
150 |
174 |
199 |
224 |
249 |
274 |
299 |
324 |
349 |
374 |
399 |
424 |
449 |
474 |
498 |
523 |
548 |
|
|
85 |
20 |
40 |
59 |
79 |
99 |
119 |
139 |
159 |
178 |
198 |
218 |
238 |
258 |
277 |
297 |
317 |
337 |
357 |
376 |
396 |
416 |
436 |
|
|
90 |
14 |
28 |
42 |
56 |
70 |
84 |
98 |
112 |
126 |
141 |
155 |
169 |
183 |
197 |
211 |
225 |
239 |
253 |
267 |
281 |
295 |
309 |
|
|
95 |
8 |
15 |
23 |
30 |
38 |
45 |
53 |
60 |
68 |
75 |
83 |
90 |
98 |
105 |
113 |
120 |
128 |
135 |
143 |
150 |
158 |
165 |
|
(���ā�Դ�����ʡ��ľ�����W�� �ď��W�j�����S�S �� �ď� ����)

| ��һƪ�� �\��С�^����ӵ�ϵ�y |
| ��һƪ�� �tԺ������g�h���OӋ�о� |