
 ϵ�҂�...
ϵ�҂�...  �A��܇��ʩ���r�˸߿��Ƶĵȷ�ֱ...
�A��܇��ʩ���r�˸߿��Ƶĵȷ�ֱ...  �¼��gIDITI ���������S���ػ�̎...
�¼��gIDITI ���������S���ػ�̎...  �h�L�����zַ���o�^���ü��_�lס...
�h�L�����zַ���o�^���ü��_�lס...  ��У���A�Oʩ���OBOT�Ŀ�о�...
��У���A�Oʩ���OBOT�Ŀ�о�...  �����ľ�����W����...
�����ľ�����W����...  ���䉺��ɰʯ�|���������^��ʩ...
���䉺��ɰʯ�|���������^��ʩ...  ��̼���н��O��������̽���c���`...
��̼���н��O��������̽���c���`...  �\Մ�Ї��Ŵ����������c�����İl...
�\Մ�Ї��Ŵ����������c�����İl...  �h�L�����zַ���o�^�Ȱ��ü��_�l...
�h�L�����zַ���o�^�Ȱ��ü��_�l...  ���Ͱl늙C���Ļ��Σ�U��e��...
���Ͱl늙C���Ļ��Σ�U��e��...  ������͙Cе�S����Ҏ���OӋ...
������͙Cе�S����Ҏ���OӋ...  ����ʮλ������������B������Ʒ...
����ʮλ������������B������Ʒ...  ����������ˇ�g�^�����OӋ��һ��...
����������ˇ�g�^�����OӋ��һ��...  ���u��������Ƽ���������OӋ...
���u��������Ƽ���������OӋ... ��x 18152 �� ��܉ʽ������ʩ���еđ��ù���̽ӑ
��܉ʽ������ʩ���еđ��ù���̽ӑ
�� ��
���н����ֵڶ����O��������؟�ι�˾ 430000 ��h��
1.���̺���
�������H�V���k���Dz�������ŽM�������-�ź�оͲ�Y���wϵ������228m������4�ӣ�����49�ӡ����е����Č��cȹ���B��һ�w��6�����Ϟ�˜ʌӣ��Ӹߞ�4m��ƽ��ߴ��45.7��42.7m�������������Ͳ���O�A��䓹�����H�������
������6�����ϲ��õ�܉��ʽ����������o���w��܉��ʽ�����ܰ���ˮ�εȹ��̌��H��r�ԽM��������λ�����ۯB�_�ּ܆�Ԫ������֧��ϵ�y������ϵ�y������ϵ�y�ͷ������b�õ��岿�ֽM�ɡ�

2.܉��ʽ�����ܵIJ���
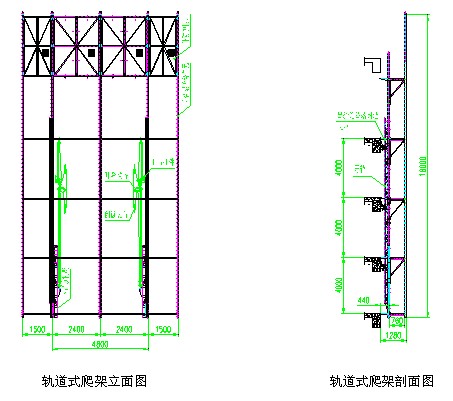
2.1 ƽ�沼��
2.1.1 ܉��ʽ�������m��ƽ�������ߴ���^Ҏ�t�Ľ��������w��Ƥ�˱M�����óɴ�ƽ�棬������F��̎�սǣ��������w���w�ԡ����w�Ŀv���M��鯳ߴ��4��2.4m�����w�������߶Ȟ�200m��

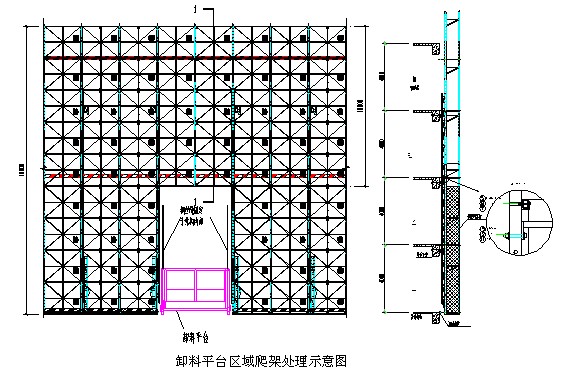
2.1.2 ����Ͻ�������ˮʩ����܉��ʽ�����ܰ���ˮ�ηֲ������w�M�к����ֽM�����C�ֽM�c��ˮ�Ό������ֽM�p�c��ˮ�ηֶ����m�����ֽM�p���m������ʩ����ˮ�����ʩ���ο��^��ˮ�ֶ�̎��������ʩ�����o�������̸����ϱ���ˮ�εĄ��֣�����2�M������2�M���D��̎���ø�ʽ�������ɂ�ƽ����B��������
2.1.3 �����������Oλ�ü���������ˮƽ����ֱλ�ã������۰��b�r�����^���w�Ȳ����ڼ��w�OӋ�r��һ��Ҫ���⸽���ۺ��������U��λ�����_ͻ����t�����ڸ�����̎Ҫ���н��w�����°��b����������ԓ�ڸ���̎�O�ÆΪ���һ���ܣ������˿�ܵ�ˮƽ����̓ɶ˵Ę�����_���á�ܛ�B�ӡ����tֻ�茢܉��ʽ����������o�W���_�ְ���������ɾֲ���������
2.2 ���沼��
2.2.1 ʩ��ǰ����ʩ���M�ȼ����D����Ͷ����r�M������Ҏ�������ڱ�����������4��ˮƽģ���M�����D���鱣�Cʩ���nj����µ�3���Ӳ�ģ�����R߅�İ�ȫ��܉��ʽ���ܸ��w4�ӽY����3���nj�+1�����I�ӣ������w�߶�18m�����w4���njӼ�����ʩ���nj�2m�M����oҪ�����w���߰��վ��w�Ӹ��M���{���������c�Ӹ�һ�£����C�ܷⷭ���܉���ȫ�ܷ⣬�O��4���ܣ�픲���4���ܟo���塣܉��ʽ�����ܼ��w���Ռ���0.76m�����������U��ǻ߅�ࣩ����̎�������OӋ�rһ��Ҫ���]�������R߅�Ƿ������壬Ҫ���˜ʷ����M�и��죬�_�������r���Ա����塣
2.2.2 ���w�ۯB��Ԫ������б���ΗU�cÿ�����U�Ͷ�������_�ְ�����˨�M���ɿ��B�ӣ��ۯB��Ԫ�Ƀ������U��б�ΗU����������_�ְ塢���塢䓽z���o�W�M��һ�����g��ܽY����
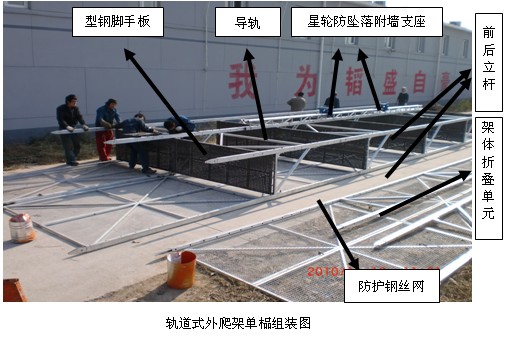
2.2.2 ���w�ۯB��Ԫ������б���ΗU�cÿ�����U�Ͷ�������_�ְ�����˨�M���ɿ��B�ӣ��ۯB��Ԫ�Ƀ������U��б�ΗU����������_�ְ塢���塢䓽z���o�W�M��һ�����g��ܽY����
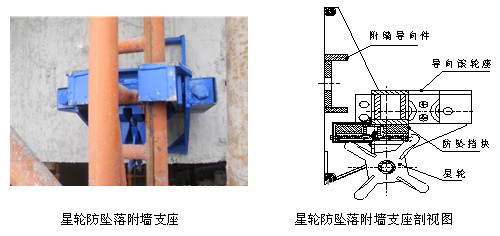
a����֧�����������飺��݆�����丽��֧������݆�����D�ӣ����ψDʾ�����r��D�Ӟ����D��형r��D�Ӟ鷴�D���r�������K�oֹ���ӣ���݆�����D�ӕr�������K�S��݆݆�X�����\�ӣ����c�������K���|����݆݆�X�D�ӽǶ��_15�㡫30��r���������KѸ�ُ�λ��
b����֧���Ĺ���ԭ��飺�����X݆�X�l����ԭ������݆�ஔ���X݆����܉�ஔ���X�l�������������¼ܕr����܉���\�ӣ�������݆�������D�������������K���M���������w����r�����ٶȴ��ڷ������K��λ�ٶȣ��Ķ�������܉�����o���w���䡣
2.2.4 ����ͬ������ϵ�y��ʹ����̖��7.5T��늄Ӻ��J�������Կ��b�ú�������J�b�ü��ϡ��µ������ÿ���Cλ����������������ϵ�y����늄Ӻ��J����ϵ�y��
��ȡ�b����̖�Ԅӿ���늄Ӻ��Jͬ�r���Ӻ��P�]���_��ÿ�_���J���г̾��x��ȡ�
3. ��ˇ����
3.1 ܉��ʽ���ܰ��b����
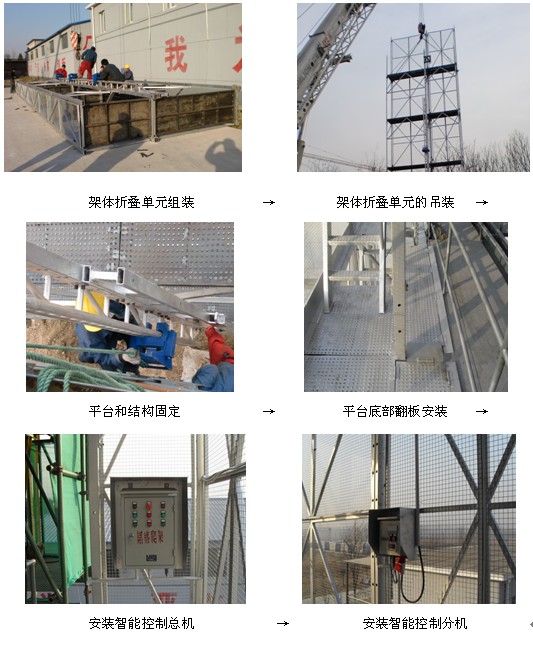
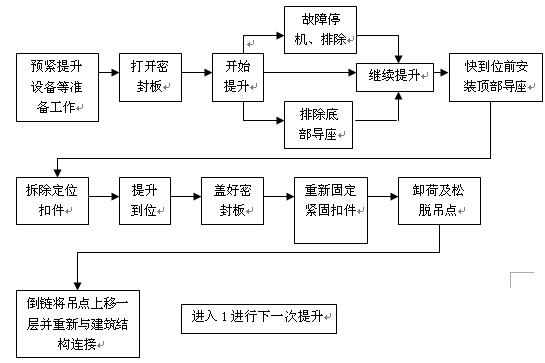
3.2 ܉��ʽ������������
4. ��ȫ�������C��ʩ
4.1 ��ȫ���o
4.1.1 ���I����o
�����U�����з��o䓾W���Ȃ����U����O���I��ĸ�������˨�B���o��ڗU��δ��O���I���λ�ÿɲ��O��
4.1.2 ���w�c�Y���g϶���o
a�����w�����U�c�Y���g��϶���Ȟ�400mm��܉��̎��200mm�������I�r��������_�ְ巭�巭���c�_�ְ�ƽ����r���ڌ�С���巭��������ڽY���ϡ�
b�����w�ײ���픲����I�����g϶����������_�ְ�ķ����ܷ⡣���匒�Ȟ�400mm��ʹ�����x���w�Y�����x������80mm������С������ژǰ��ϵČ��Ȳ�С��20mm���˲���̧�𡣿��ډ��ϕr��С�����̧��Ƕ���45�㡫60����ˡ�
c��ÿ�λ������������r�z��ײ��ܷ���Пo�������ѷe���l�F�������ѷe���r�ڻ���������ǰ�����Ƀ�����ֹ�����������������o�����ӡ�
4.2 �S�o�ͱ��B
4.2.1 ȫ�����������oƽ�_ÿ������ǰ��ʩ����M�����������ļ��w�Ĺ̶�����֧���ȵ���݆�������M�Йz�飬�l�F���}�����r���Q���ɹ��̲���պ��ֺ��M��������
4.2.2 ���ڌ�늄Ӻ��J�M�оS�o���B����ע�����ͣ��z��늄Ӻ��J���i�b�ã�朗l��r�ȡ�
4.2.3 �z�阋��������r���Ғ���³���r���ۼ��ɾo��r�ȡ�
4.2.4 �z��������䓽z�K��䓽z�K�A���ɾo��r�ȡ�
4.2.5 ÿ����������ģ����������w���o�ù̶�����֧��������ˮ��ɰ�{���҉m�s����M�댧��������b�Ãȣ��Ա��o�����[����`�������
4.2.6 ��������������6-8�Ӻ���ܕ�����䓹ܵ�ƣ�ڮa��׃�Σ��ڬF��Ѳ����^��������l�F�д�F��l������횸��Q��������
4.2.7 ����֧�Ρ�����֧���c�����Y��֮�g���B����˨���z���Ƿ�����OӋҪ�Q�o����˨¶����ĸ��������3���z�ۡ�
5.�M�ȹ������C��ʩ
5.1 �����ܽM�b�M��Ӌ��
�������Y�����w���̵��M��Ҫ��_���M�b�r�g�������C�ۯBʽ�����_�ּܸ߳�ʩ�����I��2�������w3���njӼ�1��ʩ���njӣ��ڽY��ʩ����9�ӕr�_ʼ���b܉��ʽ�����ܣ��ۯBʽ�����_�ּܼ����b�r�g�s7�죬������Ҫռ�ìF����ƽ��300m2�Ĉ��أ�δ���b���b�ۯBʽ�����_�ּܵ�����̎�Կ��M���������N�����I����Ӱ����wʩ���M�ȡ�
5.2 ����Ӌ��
܉��ʽ�����ܵ������ԝM��������ʩ���M��Ҫ���ʣ�ͨ����r��ÿ����һ�M�IJ������ڞ�1��2�������ա������������I�njӵ�ģ��֧�μܴ��O��ɕr����������һ��ģ�����ꮅ������һ�ӻ�������ע���1������b�����_���Q��ұ۸߶Ȳ�����6m���@���r�����������ȝM����w�İ�ȫ��Ҫ�������������ٶ��_�����I�ӷ��o�˸ߣ����Ҍ��ڑұ۸߶��^�ߵĆ��}���Բ��ú�ʩ���njӵ����w�B�Ӂ�̎�����_���˰�ȫ���s�˹��ڡ�
6.��������ʩ����ݡ�����ʩ��꠵���υf�{����
6.1 ��������υf�{����
6.1.1 �����ĸ����U���������������ڵ�λ�á�
6.1.2 �����ĸ����U�������ܵ����������U���ڸ����U̎�H�茢����o�W�͘nj��ߵ��������ͿɌ��F����Ӱ����ܵ�����������
6.1.3 ��������Փ���ɸ߶�һ���42m���ң��鱣�C�M�����I�njӵ��������\�߶ȣ�������횱����I�njӸ�8m���ϣ�����nj����������O�������ܵ��·������Ա��_���ܺ����۵�ì�ܣ���ÿ��3���njӾ�Ҫ���bһ�������U���dz�����������������ÿ��30m�O��һ�������ۣ����������ϵĸ߶Ȟ�12m�������b�ˌӸ����ەr���Y��ʩ������һ�ӣ����˕r��ʩ���nj����Ϟ�8m��12m-4m�����_����ʹ�õ��^�ĵ�������ÿ��30m���bһ�������������߶ȣ����ܝM�㰲ȫҪ���ֽ�����
6.2 ʩ����ݵ���υf�{����
���˱��Cʩ��������ϵ�ʩ���njӣ���܉��ʽ�����ܵ�����ƴ�b�M���{��������ʩ������\�еĿ��g���������ܔ��_̎�������^����䓰�W�M�з�¡�
6.3 ����ʩ��꠵���υf�{����
6.3.1 ����ʩ��꠱������������ǰ�����טnjӵ�ģ������������t��טnjӵ�ʩ���]���R߅���o��
6.3.2 ���ܸ���֧��̎��ģ����Ҫ�ژnjӻ�������ע�ڶ���������t��Ӱ푵����w�������M�ȡ�
6.3.3 ���r���b������������Ӱ푷�ģ�r�g��
6.3.4 ֧ģ��䓹ܡ�ľ�ʵ�����Y��߅������̫�L����������15cm�ȣ���t��Ӱ푵����w�������� Ҫ�������wС����ķ��ۿ��g��
6.3.5 �����������^���нY����߅��ֹ��ģ������l����������˵��¹ʣ�����ڼ��w�������g�ײ��ķ���̎���_���Ġ�B������Ď��ʺܴ�
6.3.6 ֧ģ�����U���ú������λ�����_ͻ����鸽������b������ľ���ڲ�֪�����r���O�������U���¸����岻�ܰ��b��
6.3.7 �����ܵĸ������A������ܵ���ʽ������ڝ������������^���Юa����λ�ƣ����������������o�������B�ӣ�Ӱ�����������
6.3.8 ж��ƽ�_��Ҫ����������ǰ���x����tӰ푼��w����������������߀�]���굫����Ҫ�������Cʩ���njӵ��R߅���o���͕������ܵ�������1��2��ж��ƽ�_��λ�_�ڡ����C���w��������Ӱ푡�
7. �Y�Z
܉��ʽ����������һ�N���͵��_�ּ���ʽ���c����ʽ���_�ּ���ȣ�һ��Ͷ����ϴ��p�٣�����ʽ�����_�ּ�ƽ�����s䓲�ʹ�üs2/3��3/4��һ�δ��Oѭ�hʹ�ã����s�˹��M�s30%�������ʩ���^�����_�ּܴ��O���˹��M�á�ʹ���^���У��������������������ռ���������p�لڄӳ̶ȡ��ӿ�ʩ���M�ȣ����F�˸ߌӽ����_�ּܹ�ˇ�ęCе��ʩ��������˸ߌӽ���ʩ���Cе��ˮƽ�����M�˽���ʩ�����g���M����܉��ʽ�����mȻ��ʩ���^����Ҳ���ںܶ��f�{����ϵĆ��}�������쪚��ă��ݱ،���ɞ鳬�ߌӽ���ʩ�������x��
(���ā�Դ�����ʡ��ľ�����W�� �ď��W�j���ď� ���S�S �� ���� ����)

| ��һƪ�� �ߌӽ����������ͼ��g������ |
| ��һƪ�� ���ЙC�P�������������ܱO�yƽ�_���O |