
 ϵ�҂�...
ϵ�҂�...  �A��܇��ʩ���r�˸߿��Ƶĵȷ�ֱ...
�A��܇��ʩ���r�˸߿��Ƶĵȷ�ֱ...  �¼��gIDITI ���������S���ػ�̎...
�¼��gIDITI ���������S���ػ�̎...  �h�L�����zַ���o�^���ü��_�lס...
�h�L�����zַ���o�^���ü��_�lס...  ��У���A�Oʩ���OBOT�Ŀ�о�...
��У���A�Oʩ���OBOT�Ŀ�о�...  �����ľ�����W����...
�����ľ�����W����...  ���䉺��ɰʯ�|���������^��ʩ...
���䉺��ɰʯ�|���������^��ʩ...  ��̼���н��O��������̽���c���`...
��̼���н��O��������̽���c���`...  �\Մ�Ї��Ŵ����������c�����İl...
�\Մ�Ї��Ŵ����������c�����İl...  �h�L�����zַ���o�^�Ȱ��ü��_�l...
�h�L�����zַ���o�^�Ȱ��ü��_�l...  ���Ͱl늙C���Ļ��Σ�U��e��...
���Ͱl늙C���Ļ��Σ�U��e��...  ������͙Cе�S����Ҏ���OӋ...
������͙Cе�S����Ҏ���OӋ...  ����ʮλ������������B������Ʒ...
����ʮλ������������B������Ʒ...  ����������ˇ�g�^�����OӋ��һ��...
����������ˇ�g�^�����OӋ��һ��...  ���u��������Ƽ���������OӋ...
���u��������Ƽ���������OӋ... ��x 4441 �� ����ȫ���l�Ƕ�λ(GPS)���g��������ʩ�����ƾW
����ȫ���l�Ƕ�λ(GPS)���g��������ʩ�����ƾW
�����������ϴ��ʩ�����ƾW�Ľ���
���\�i
(�����п��yԺ 350001)
һ�����̸���
�������ϴ���������}���ϸ��ϣ�λ�ڽۈ@����c��߅���֮�g���Ǹ��ݽ�ɽ� ^�B���}���Ͻִ�W��Ƭ�^����Ҫͨ��֮һ�����ϴ���B�Ӿ�����ȫ�L3.1km�����п罭(����)���Ll740m����ɽ� ^������lOOm������350m���Ͻְ������L175m������144m���Ӿ���·�L��575m��ȫ��DƬ���D��
��ʩ�����ƾW�����ֳ��y�Ͷ��y�ɴ֣����y��Ŀ���ǰ�����Ҏ�����OӋҪ��y�Ř�λ���M�Ѓɰ��Ӿ��y�����������ϴ�������ȴ�ʩ����Ҫ���ʩ�����ƾW�����^�ߵľ��ȣ����S���Q��������·���yҎ������Ҏ�����ĵȾW����ʩ�y�������S�����������`�����l/40000����ʩ��ƽ����ƾW���y�Ͷ��y������GPSȫ���l�Ƕ�λ���g����߅�Ә��W��ʽ����ƽ��ʩ�����ƾW����_��ԓƽ��ʩ�����ƾW���ȺͿɿ��ԣ����Ïƿ�ȫվ�x(2s��)�����ֿ����c��߅�ǾW�^�y�����M�Ќ��ՙz�ˣ��߳̾W���ֲ�������ˮ��ֱ�Ӝy����
���yƽ���ƽ�������cl���cλ���`���--+6.9mm�������������`������Ac���������`���1/243082С����1/80000�����yƽ���ƽ�������cI���cλ���`�����3.6mm���������������`������Ac���������`���1/293948С����1/80000��
����GPSƽ����ƾW����
1�����y
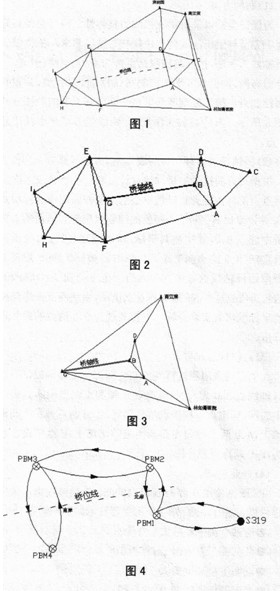
�ژ�λ�������������O7��ƽ������c(�總�D1��ʾ)��GPS�^�yʹ��6�_Trimble4600SL���l���ՙC�������o�B��λģʽ�M��ʩ�y���y�^�����������c������tԺ���Ͻ��I�����λƽ����ƾW�������c���_���@����z���c��ƽ��Ӌ��@ȡ��λ�����������c�ĸ��ݳ��еط�ƽ��ֱ�����ˣ�����S���Ř��ṩ���ơ�
2�����y
(1)���W����
�鱣�Cȫ���Լ������B�Ӿ������w�ԣ�ͬ�r���ʩ�� �^���������c����ķŘӶ�λ��Ҫ�c����Ҫ��λ���ƾW�Ԙ��S�������ģ����Ʒ������������c�ϡ�������������һ����ȫ�沼�W����λGPSƽ����ƾW(�總�D2��ʾ)�����O9�� ƽ������c��ʩ�����ƾW�c����ƽ������ϵ�y���ӷ�ʽ�總�D3��ʾ������������tԺ���Ͻ��I�鸣ئI�гǽ�����GPS�c��
(2)���S���c���OӋ�c�y��
�����OӋԺ�ṩ�Ę��S���OӋ�Y�ϣ��ژ��S���������xȡ���c(�}���ϸ۞���鉦�����c�����ޞ鰶߅ˮ����c)B��G����Ӌ��������ˡ��ɳ��y�Ŀ����c���ˌ��ؾ��_�Ř�������о��cB��G�������y�����ˣ����_�y��(�M�д�≺�͜� �ȸ���)B��G���c�g�ľ��x����8�c��̶��c��8�c���Ͻ����ް�߅���S���cG�ķ�λ�Ǟ�̶���λ�ǣ�B��G�g����y��߅�L��̶�߅�L������Ӌ��G�c���ˣ��ɴ˃��cͶӰ�����S�ϵ�����ȡ���䌍�y���ˣ�������ҕ��B��G���c����K�OӋ����ֵ��
(3)�cλ��־�����O
�ł��c��������Ժ���Ƶ�GPS��־(�ϲ��~�壬�²����)���S���c8��G���O�r���Ȱѷ��鉦��ˮ������g���һ���m�еĶ�����־�c�����_�y�ź�̶���I��H���c���O�������鉦�ϣ�A��D���c���O�ڽ����ϸ۷��鉦�ϣ�E�c���O�����a�^��F��C���c���O�ڹ̶������ϡ�
(4)��I�^�y
GPS�^�yʹ��6�_Trimble4600SL���l���ՙC�������o�B��λģʽ�M��ʩ�y����I�^�y��Ҫ���g���£�
��Ч�^�y�l�ǔ�����4�����ΈD�Ώ�������PDOP<6���^�y�l�Ǹ߶ȽǴ���l5����
ÿ�r���^�y�r�g��45��犣�ƽ���؏��Oվ������l.61���c��������ϵ�y�W�y�c��5����
(5)��������
�����������Trimble���ՙC�S�Cܛ��GPSvery2.35����I�^�y�Y���r���d�����M�л������㣬��ȡͬһ�r���^�y�������ʾ�С��l0����rati0ֵ������6�����M�Йz�z��Ŀ����ͬ���h�]�ϲ�����h�]�ϲ�ɷN�z��λ�������]�ϲ�ȽyӋ���£�
ͬ���h�]�ϲ��С��1PPm�����h�]�ϲ

(6)ƽ��Ӌ�� GPS�Wƽ�����ԭ��h�y�L�Ƽ���W���Ƶ�PowerADJ3.0�Wƽ��ܛ����������WGSһ84����ϵ���M�����S�o�s��ƽ��������S�������������M��V��3 0���������������Ĵֲ���ڸ��ݵط�ƽ��ֱ������ϵ���M�ж��S�s��ƽ����S�s��ƽ��փɴ��M�У�����������ƽ������c��̶��c�M�ж��S�s��ƽ�Ӌ�������λ�����c���ˣ�����B��G���c����K����ֵ��ͶӰ��߶�ȡ���λ�õ�54�E���(66m)�M�ж��S�s��ƽ��c���п��ƾW�y�r����Ø��S��B-G�c�������������`���l/371885����8��G���c��K����ֵ�M�ж��S�s��ƽ����cλ�`����0.O4cm-0.36cm���������������`����1/264649��1/2128948���M���OӋҎ��Ҫ��
������λ���ƾW�y�O���ȼ��cGPS�W�ı��^
(1)��λ���ƾW�y�O
��_������ʩ�����ƾW�ľ����c�ɿ��ԣ����Üy߅�ǾW��ʽ��ʩ�����ƾW�M�Йz�y�����Ïƿ�ȫվ�x(2s��)���^�y2�y�أ����е��^�yֵ�����^��≺���ضȡ����R���������ȱ�Ҫ�Ĕ�������̎�������ĵȘ�λ���ǾW����Ҏ�����У�����Ҫ����ָ�����£�
�y�����`����5�������S���������`��1/400001�������������`��l/0000������������]�ϲ�9����
ƽ���߅�ǾW���cλ�`��0.8c11r0.7cm�����������`����1/2300��1/58900�����S�����������`���1/9200��
(2)GPS�W�c�y߅�ǾW�ı��^
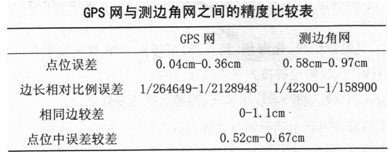
GPS�W�c�y߅�W����^����߅�L�^����O-1.cm���cλ���`���^����0.2cm-0.7cm���ɴ˿�Ҋ��ԓ������߅�ǾW�c GPS�W�����Ǻ��^�ã���GPS�W�������@���ڜy߅�ǾW�ľ��ȡ�
�ġ���λ�߳̿��Ɯy�����c�M��ˮ�ʵı��^
(1)�߳̿��ƾW���O����
�����߳̿��ƾW�M��4������ˮ���c(PBMlһPBM4)�c����ʩ��ˮ���c�M�ɣ��ڃɰ����O��һ�M����ˮ���c������ˮ�� �c�O���x���о����h���Ă��߉���������ϡ�ʩ��ˮ���c�� �O�������������е��O���ڈԹ̵Ľ������ϣ���������������ÿ300mһ500m���Oһ����
(2)���ȡ��ĵ�ˮ�ʜy�� ���ϱ�������ˮ���c(PBMl��PBM4)�c�ǽ�����ˮ���c$319֮�g���O�]��ˮ�ʾ�·(�總�D4��ʾ)���M������ˮ�ʜy�����ڻ���ˮ���c�cʩ��ˮ���c֮�g���O�ĵ�ˮ�ʾ�·���M���ĵ�ˮ���y�������ĵ�ˮ�ʜy�������ò�˾DINlll���ˮ�ʃx���c֮���חl�aˮ�ʳߣ�������С����������ĵ�ˮ�ʜy��Ҏ������헼��gָ�ˡ�
(3)�߳̿��ƾWƽ��Ӌ��
�߳̿��ƾWƽ��Ӌ��������Aɽ�SNASEW95���ƾWƽ��ܛ�����Ա�������ˮ���c$319�������c�����M������ˮ�ʾ�·��ƽ��Ӌ�㣬ÿ����ˮ�ʜy���߲��Д������`���1.1mm�������c�߳����`���2.1mm�����о���ָ�˾��M������ˮ�ʜy������Ҫ��Ȼ�����Ի���ˮ���c�������c���M���ĵ�ˮ�ʾ�·��ƽ��Ӌ�㣬���о���ָ�˾��M���ĵ�ˮ�ʜy������Ҫ��
(4)�cGPS�M�ϸ߳�����^
�����y��A��D��E�ĵ�ˮ�ʸ߳��������㔵������������λ�����c�M�и߳̔M��Ӌ�㣬���И��S��B��G�c��GPS�M�ϸ߳��cˮ�ʜy���߳�����^�����S��B��G�c�ĸ߲��^���0.9mm���f��GPSˮ�ʾ����cֱ��ˮ�ʜy���Y�����^�Ǻϡ�
�塢�Y���Z
1��GPS�W�ľ��ȃ��ڜy߅�ǾW�ľ��ȣ�����GPSȫ���l�Ƕ�λ���g�����߾��ȵĿ��ƾW����ȫ���еģ����ҷ��㡢ʡ�r��
2���鱣�C����ʩ����ӕr�����F�eλ����ʩ�����ƾW�����rҪ�v�����w�ԣ�ƽ��Ҫ�Ԙ��S���σ��c��K�����OӋֵ�����㔵�����̜߳y�������]��ͬһ���c��
�����īI��
[1]JTJ 061��99����·���yҎ��[S]������ͨ�����磬1999��
[2]��B㌣������A����־����������GPS�y��ԭ��������[M]����h�y�L�Ƽ���W�����磬1998��
[3]GB l2898��91�����������ĵ�ˮ�ʜy��Ҏ��[S]��
�����ā�Դ�����ʡ��ľ�����W�� �ď��W�j�������t ���S�S �� �ď� ���ˣ�

| ��һƪ�� סլ�Gɫ���g�OӋ̽ӑ |
| ��һƪ�� �����и�����ס�^�������g�{���c˼�� |