
 (li��n)ϵ�҂�...
(li��n)ϵ�҂�...  �A��܇��ʩ���r��(bi��o)�߿��Ƶĵȷ�ֱ...
�A��܇��ʩ���r��(bi��o)�߿��Ƶĵȷ�ֱ...  �¼��g(sh��)IDITI ���������S���ػ�̎...
�¼��g(sh��)IDITI ���������S���ػ�̎...  �h�L�����zַ���o(h��)�^(q��)���ü��_�l(f��)ס...
�h�L�����zַ���o(h��)�^(q��)���ü��_�l(f��)ס...  ��У���A(ch��)�O(sh��)ʩ���O(sh��)BOT�(xi��ng)Ŀ�о�...
��У���A(ch��)�O(sh��)ʩ���O(sh��)BOT�(xi��ng)Ŀ�о�...  �����ľ�����W(w��ng)����...
�����ľ�����W(w��ng)����...  ���䉺��(sh��)ɰʯ�|���������^(q��)��ʩ...
���䉺��(sh��)ɰʯ�|���������^(q��)��ʩ...  ��̼���н��O(sh��)��������̽���c��(sh��)�`...
��̼���н��O(sh��)��������̽���c��(sh��)�`...  �\Մ�Ї��Ŵ����������c�����İl(f��)...
�\Մ�Ї��Ŵ����������c�����İl(f��)...  �h�L�����zַ���o(h��)�^(q��)��(n��i)���ü��_�l(f��)...
�h�L�����zַ���o(h��)�^(q��)��(n��i)���ü��_�l(f��)...  ���Ͱl(f��)늙C(j��)���Ļ��(z��i)Σ�U��e��...
���Ͱl(f��)늙C(j��)���Ļ��(z��i)Σ�U��e��...  ������͙C(j��)е�S����Ҏ(gu��)���O(sh��)Ӌ(j��)...
������͙C(j��)е�S����Ҏ(gu��)���O(sh��)Ӌ(j��)...  ����ʮλ������������B������Ʒ...
����ʮλ������������B������Ʒ...  ����������ˇ�g(sh��)�^(q��)�����O(sh��)Ӌ(j��)��һ��...
����������ˇ�g(sh��)�^(q��)�����O(sh��)Ӌ(j��)��һ��...  ���u��������Ƽ���������O(sh��)Ӌ(j��)...
���u��������Ƽ���������O(sh��)Ӌ(j��)... ��x 6827 �� ������ܻ����������ӿ���ԇ�(y��n)�о��c����Ԫ����
������ܻ����������ӿ���ԇ�(y��n)�о��c����Ԫ����
Ѧ���� ��� ���
ͬ��(j��)��W(xu��) �Ϻ� 200092
20���o(j��)70������˂������з��������ܵIJ����ں��ڻ��w�����У�ʹ�ƳɵĽY(ji��)��(g��u)�����˂������������ܹ��������@�N�߂����ܹ��ܵĽY(ji��)��(g��u)�ͱ��Q֮�����ܽY(ji��)��(g��u)��
������ܽY(ji��)��(g��u)��ָ�ڻ��w�Y(ji��)��(g��u)�в��É�늲���������к��(q��)��Ԫ�����������ܽY(ji��)��(g��u)�������H�����Ը�֪�����m��(y��ng)�����\������ޏ�(f��)�ă�(y��u)�c(di��n)������߀���м����к��(q��)��һ�w���ă�(y��u)Խ���ԡ����������ͨ��ָ�ԉ�늲��������(q��)��Ԫ��������������ľ�����I(l��ng)������������������ܽY(ji��)��(g��u)����V韵đ�(y��ng)��ǰ����
����մ��(q��)����ͨ�^�ֲ����л�M���(q��)���܉�@���^����(q��)�������Ɍ�(sh��)�F(xi��n)���Y(ji��)��(g��u)׃�κ���ӵ����ӿ�����Ŀǰ���������_չ��ᘌ�����մ��(q��)����������������ԇ�(y��n)�о�������Ҫ���ں��պ����I(l��ng)���о������༯������ӿ��Ʒ��档����(n��i)���@һ�I(l��ng)����о�߀̎�����A�Σ����_չ���о�����Ҳ��Ҫ�����ں��պ����I(l��ng)���׃�κ���ӿ��Ʒ��棬���m������ľ���̵ĉ�����ܽY(ji��)��(g��u)���о��t���ǿհף��@���Ӱ��ˉ�����ܽY(ji��)��(g��u)����ľ�����I(l��ng)���е��ƏV�͑�(y��ng)�á�
�b�ڴˣ������ڇ���(n��i)���״��M(j��n)�л��ډ���(q��)���������ܻ���������(y��ng)׃��׃�κ��ѿp�����ӿ���ԇ�(y��n)�о��c�Ǿ�������Ԫ������
1��ԇ�(y��n)�O(sh��)Ӌ(j��)
1.1ԇ���O(sh��)Ӌ(j��)
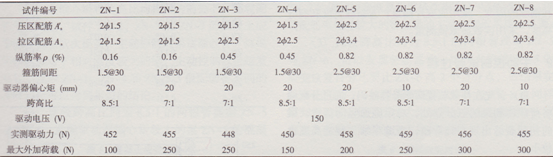
���O(sh��)Ӌ(j��)8��������ܻ���������ԇ�����������������������ü�(x��)ֱ��䓽z����������������ϱȞ飬R32��5ˮ�ࣺʯ�ң���(x��)ɰ��ˮ=1��1��20��3��80��0��78��8�����Ŀ���c����ߴ���ͬ����̖�քe�飺 ZNһ1��ZNһ2��ZNһ3��ZNһ4��ZNһ5��ZNһ6��ZNһ7 �� ZNһ8����ԇ���O(sh��)Ӌ(j��)����(sh��)�����v������ʣ��֞�0��16����0��45����0��82���������Ŀ�߱ȣ��֞�8��5��1��7��1������(y��ng)������ȷքe��510 mm��420 mm�����(q��)�������O(sh��)λ�ã�����(q��)���������O(sh��)��ԇ���˲������к��S��ƫ�ľطքe��10 mm��20 mm��8��������ܻ������������Ԕ�D��Dl��ʾ��ԇ���O(sh��)Ӌ(j��)����(sh��)�����ԔҊ��l����ԇ�����ϵ����W(xu��)����Ҋ��2�ͱ�3��
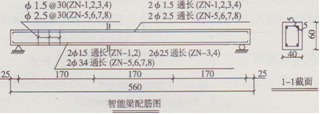
�D1��ԇ�����D
��1ԇ������(x��)��
��2䓽z�����W(xu��)����(��λ��MPa)
��3�����������W(xu��)����(���MPa)

1.2ԇ�(y��n)�b��
ԇ�(y��n)���d��ʽ�������a���d�����a������ͨ�^���������f�����������c(di��n)���d̎��ԇ�(y��n)�b��Ҋ�D2���������O(sh��)����մɯB��ʽ�(q��)����(�D3)����̖��PST 150/20/18 VS25����(n��i)����B��ʽ�մ�Ƭ���ⲿ�ɲ��P䓷��b���մ������11IxF������늉�����-30��150V��
1.3���d����
ԇ�(y��n)���d��Ҫ�֞�ɂ��^�̣���ʩ������d�A�� ˾�(q��)�������õ����ӿ����A�Σ���һ�A��ʩ���Q����d����ԇ���_�Ѻ���ѿp����������ƅ���(sh��)����(d��ng)�ѿp�����_(d��)�����ƌ��ȕr��ֹͣ�Q����d���S�ֺ��d��׃���ڶ��A��ͨ�^�Դ������(q��)����ݔ��늉���ʹ�(q��)���������Ķ˲��a(ch��n)���(q��)�������Ķ��{(di��o)���������w������B(t��i)��ԇ���ļ��d�^�̅�Ҋ�D4��
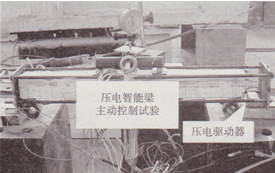
�D2���d�b�ÈD

�D3����մ��(q��)����
�D4���ӿ����A��
1.4���y��(n��i)�ݼ�����
��Ҫ���y��(n��i)�ݰ�����������(q��)�������(q��)������ͨ�^���B���(q��)�������ĸ�����Uճ�N��(y��ng)׃Ƭ�ķ����M(j��n)�Мy���������Ŀ���׃�Σ�����λ��Ӌ(j��)�y��������������䓽z�đ�(y��ng)׃�����Ñ�(y��ng)׃Ƭ�y�������ѿp���Ⱥ��ѿp�߶ȣ������x��(sh��)�@�R�y����
2�����ӿ���ԇ�(y��n)�^��
(1)�����ڒ��d�b�Ãɂ�(c��)�Ғ����a��ͨ�^�����������d�������������c(di��n)̎������ʩ���Q����d�����ij����ѿp���F(xi��n)�ڼ����Σ��ѿp�ܼ�(x��)���ѿp�߶�Ҳ�^С��
(2)��������ѿp�����_(d��)�����ƌ���(0.1 mm��0.16 mm��0.2 mm)�r��ֹͣ���d�����S�����С��׃���˕r�������������ε��ѿp���⣬������Ҳ���F(xi��n)�Q���ѿp��45��б�ѿp���ѿp��u��������ăɂ����d�c(di��n)���졣
(3)ʩ���(q��)���������ӿ����A�Σ�ͨ�^�����Դ���B��ʽ�(q��)����ͨ늉���ʹ�É���մ�Ƭ��Û�����������Ķ˲�ʩ��һ��ƫ�������Ķ��{(di��o)���������w������B(t��i)��ͨ�^�����(q��)��늉�ֵ�����Ԍ���ʩ�Ӳ�ͬ��С��ƫ�������ã���(sh��)�F(xi��n)���������đ�(y��ng)����׃�κ��ѿp�]�Ϡ�B(t��i)�����ӿ��ơ�
(4)�����ӿ����A�Σ��(q��)��������ʩ�ӿ������Ϳ��Ə��࣬�����^�쵽����׃���ڻ֏�(f��)�����Ԍ�(sh��)�F(xi��n)���ӿ�������׃�ε�Ч����
(5)�����ӿ����A�Σ��������܉��^(q��)�������^(q��)�đ�(y��ng)��������u�pС����ȶ��ԣ������^(q��)��������(y��ng)���pС�ø��࣬���܉��^(q��)��(y��ng)���֏�(f��)�����^С��䓽z�đ�(y��ng)��׃��Ҳ�^�����@�������^(q��)䓽z�đ�(y��ng)��ֵ����܉��^(q��)�֏�(f��)�ø��࣬׃�������^���܉��^(q��)䓽z�đ�(y��ng)��׃���t���������^(q��)���@��
(6)�����ӿ����A�Σ���������ѿp���ȶ��в�ͬ�̶ȵĜpС���ѿp����u�]�ϵ�څ�ݣ�ͬ�r�ѿp�߶�Ҳ�������ͣ���Ҋ�(q��)����������ʩ�ӵ����ӿ�����������Ч�،�(sh��)�F(xi��n)�����ѿp�����ӿ��ƺ��{(di��o)����
3��ԇ�(y��n)�Y(ji��)������
3.1����׃��
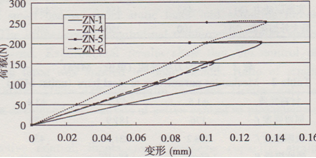
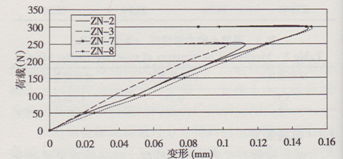
���Q����d���(q��)��������������ܻ��������Ŀ���׃�����(q��)��ǰ���(q��)�Ӻ�Ļ֏�(f��)��r�����4��8�����Ŀ��н���ĺ��dһ׃�ο�������Ҋ�D5��
��4 ������׃�Ό���

�D9���dһ�ѿp��������
�ı�7�Լ��D8���D9���Եõ�����Ҏ(gu��)�ɣ�
(1)8�����������ѿp���Ⱥ��ѿp�߶Ⱦ����F(xi��n)һ�����]�����ԡ��ѿp�����]�ϰٷֱȴ�����12��-15��֮�g���ѿp�߶ȵĻ֏�(f��)���������^С����s��7����l0�����ҡ�
(2)��������Ч��(y��ng)��Ӱ푣�������ԇ���_���Ժ��������(q��)�����������£����φ����f�����������_����֮�g�����܉����ѿp�����S֮��u�pС���ʬF(xi��n)�����ѿp�]�����ĬF(xi��n)��
(3)���^8�����������S������ʵ����ӣ�ԇ���ѿp���Ⱥ߶ȵĻ֏�(f��)�̶ȴ��³���u��ߵ�څ�ݡ������ӿ����A�Σ�����ʵ��������������ԇ���ѿp���]�����ԣ��ѿp�İl(f��)չ�߶Ȼ֏�(f��)�̶�Ҳ���á�
(4)���^��߱�ͬ��8.5��1��2��������ZN-5�cZN-6�����l(f��)�F(xi��n)�(q��)����ƫ�ľ��^�����zN-5���ѿp���Ⱥ��ѿp�߶Ȼ֏�(f��)�ٷֱ�Ҫ��ZNһ6��2��5��3��1���ٷ��c(di��n)��ԇ��zN-7��ԇ��zN-8Ҳ���и��õ��ѿp�]����������ӳ���(q��)����ƫ�ľص������܉���Ч�ظ������������ѿp�]�����ԡ�
4��������ܻ��������Ǿ�������Ԫ����
���ˌ�������ܻ������������ӿ����^���M(j��n)�и�������о���Ԕ��(x��)���˽≺����ܻ��������Ļ����������c(di��n)��׃�λ֏�(f��)��r���ѿp�]�������Լ����N����(sh��)�����������ܵ�Ӱ푣����ľ����ˉ�����ܻ����������ڱ���(g��u)�P(gu��n)ϵ�ķǾ��Է���������?q��)��F(xi��n)�ˉ�����ܻ������������ӿ���ȫ�^�̷����ͽy(t��ng)һӋ(j��)�㡣���� LDLT����������^(q��)�g��(n��i)�ľ��Է��̣�ԓ�������зֽ�ͻش����Ρ���(ji��)�s��(n��i)�桢Ӌ(j��)���ٶȿ�ă�(y��u)�c(di��n)��
��(y��ng)�ñ��ľ��Ƶĉ�����ܻ��������Ǿ��Է�������8��������ܻ�������������d���(q��)�����f(xi��)�{(di��o)�����µ�ȫ�^���M(j��n)����ģ�MӋ(j��)�㡣�Dl0�o��2�����д����Ե�������ZN-3��ZN-7��׃�λ֏�(f��)�����ķ����Y(ji��)��������������ZN-3����Ҫ����(sh��)���߱�7��1���(q��)�������O(sh��)ƫ�ľ���20 mm���v����0��45����������ZN-7����Ҫ����(sh��)���߱�7��1��ƫ�ľ�20 mm���v����0��82����
�ĈDl0���͉�����������dһ׃������������ԪӋ(j��)��ֵ�cԇ�(y��n)�Y(ji��)���Č��ȿ�Ҋ�������Ǻ����ã��`����10���ԃ�(n��i)�����ľ��ƵķǾ�������Ԫ��������?q��)��F(xi��n)�ˉ�����ܻ������������ӿ���ȫ�^��ģ�M�������鉺����ܻ������������ӿ����о��ṩ����Ч�ķ���;����
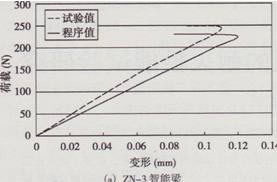
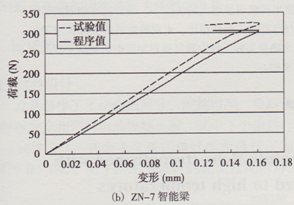
�D10���dλ�ƿ��������ij���ֵ�cԇ�(y��n)ֵ����
5���Y(ji��)Փ
��8��������ܻ��������M(j��n)�������ӿ���ԇ�(y��n)������Ԫ�����о�����Ҫ�Y(ji��)Փ���£�
(1)�(q��)��ǰ���������׃�Ό��ȱ����������ӿ����A��׃�λ֏�(f��)�ٷֱ���21����42��֮�g����ԇ���ʬF(xi��n)���^�����@������������
(2)��ʩ���(q��)���������ӿ����A�Σ���������(y��ng)׃��䓽z��(y��ng)׃���ʬF(xi��n)��u�֏�(f��)�ĬF(xi��n)��������(y��ng)׃�֏�(f��)�̶���31����45��֮�g��䓽z��(y��ng)׃�֏�(f��)�ٷֱȷ�����
22��-42����
(3)������������ѿp�����в�ͬ�̶ȵĜpС���ѿp����u�]�ϵ�څ�ݣ��ѿp�����]�ϰٷֱȴ�����12����l5��֮�g��ͬ�r�ѿp�߶�Ҳ�������ͣ��֏�(f��)����������7����l0�����ң���Ҋ�(q��)����������ʩ�ӵĿ������Ϳ��Ə�����Ԍ�(sh��)�F(xi��n)���������ѿp�����ӿ��ơ�
(4)�S������ʵ����ӣ�ԇ���ѿp���Ⱥ߶ȵĻ֏�(f��)�̶ȴ��³���u��ߵ�څ�ݡ�
(5)�����(q��)������ƫ�ľؿ����������׃�λ֏�(f��)��r����߷�����5�����ң��(q��)����ƫ�ľص�����Ҳ���������ԇ���ѿp���]�����ԣ��ѿp���Ⱥ߶ȵĻ֏�(f��)�̶�����˼s2.5����3.1����
(6)�����˻��ڲ��ϱ���(g��u)�P(gu��n)ϵ�ĉ�����ܻ����������ӿ��Ƶ�ȫ�^��ģ�M����������Ӌ(j��)��ֵ�cԇ�(y��n)�Y(ji��)���Ǻ����á�
�����īI(xi��n)
[1]���֣����i���������ܽY(ji��)��(g��u)�����W(xu��)�О���̑�(y��ng)�á����W(xu��)�M(j��n)չ��1998
[2]���������K���c���������ܽY(ji��)��(g��u)�����W(xu��)���Լ��乤�̑�(y��ng)�á����I(y��)������2000
[3]�Ռ��������ܲ��ϽY(ji��)��(g��u)���������������I(y��)�����磬l997
[4]Hanagud S, Obal M W, Calise A J. Optimal vibration con- trol by the use of piezoceramic sensors and actuators. Journal of Guidance, Control and Dynamics,1992
(���ā�Դ�����ʡ��ľ�����W(xu��)�� �ď��W(w��ng)�j(lu��)�����S�S �� �ď� ����)
